Hi everyone!
Im sure most of us have had to tweak our codes with the new firmware update. I am trying to run odrive on python but I am getting this error.
"while my_drive.axis0.current_state != AXIS_STATE_IDLE:"
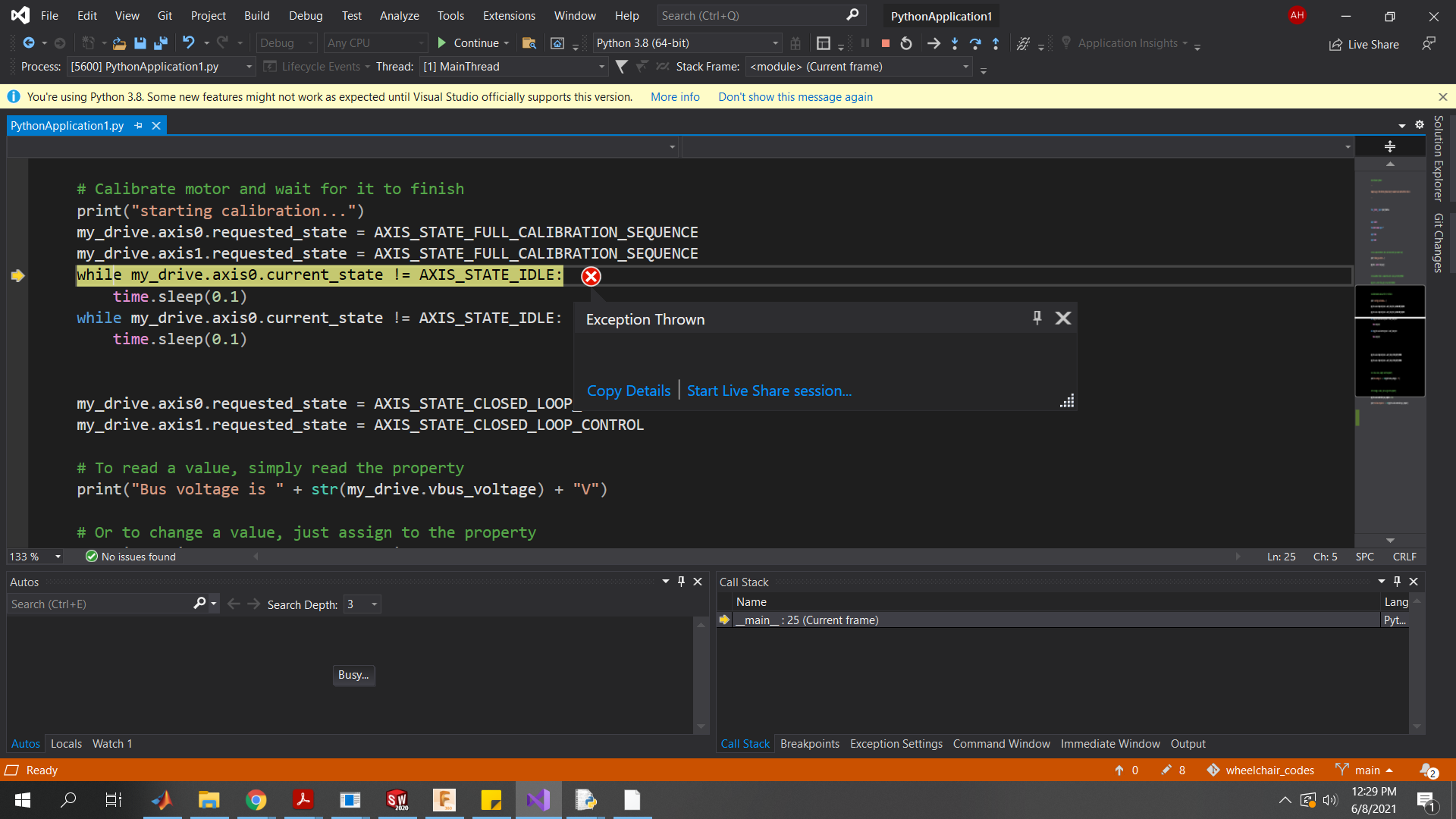
Prior to this my code was working and odrive gave me no issues. i am still able to control velocity in a command window just fine but not for this one very specific application 