Hello everyone,
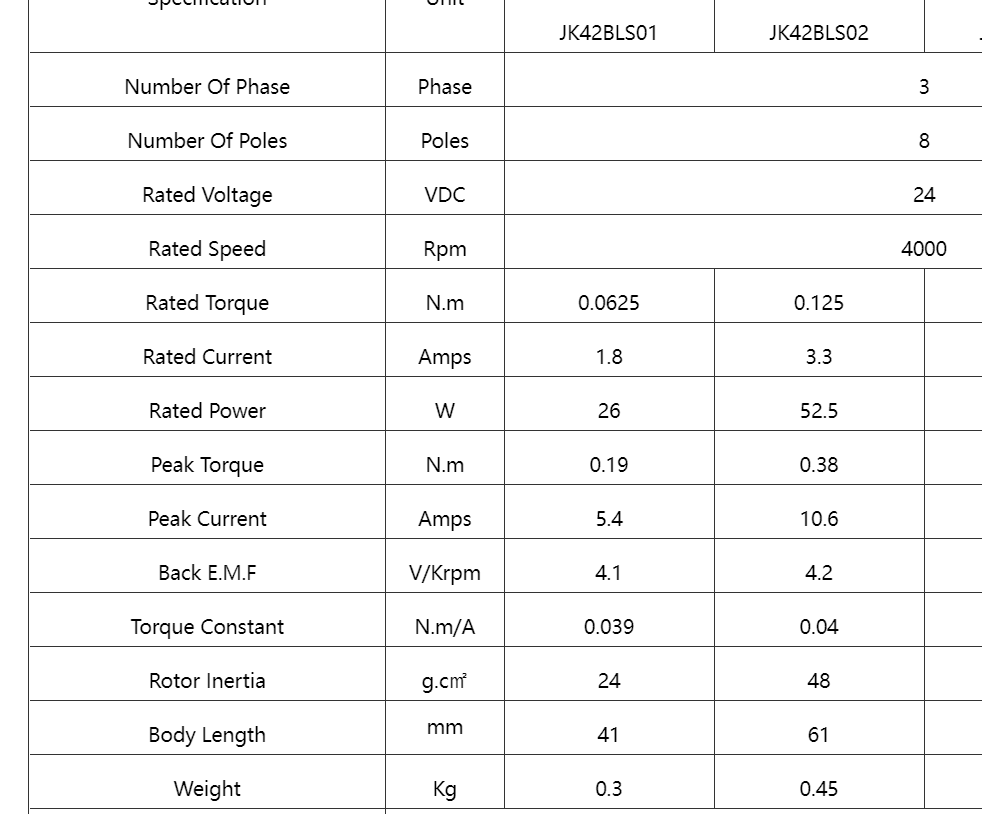
I have some issue with Odrive V3.6 56v. It is my first project with odrive. I use one small motor JK42BLS02 from china with hall sensors, 8 poles, torque inertia 0.04, rated current 3.3A, rated speed 4000 rpm and rated voltage 24V.
Every time I try to calibrate motor, it goes to fault state MOTOR_ERROR_DRV_FAULT, or if I increase the calibration voltage and current it goes to MODULATION_MAGNITUDE . Sometimes If i changed these two values I took ERROR_PHASE_RESISTANCE_OUT_OF_RANGE. It wasn’t able to measure resistance and inductance in MOTOR_CALIBRATION. No motor move, no beep.
Gate driver does not have any error. It is only in motor and I am able to clear this error. Resistance between two wires connected to odrive is 1,19 Ohms (all wire combinations are the same).
I run now from 12V Pb battery with voltage around 12,4V (I tried connect another one with 22V, but there was no difference).
Another problem is that encoder is_ready property is still false after settings. With encoder I tried Polarity calibration and Phase calibration.
I made this settings:
odrv0.axis0.motor.config.motor_type = MOTOR_TYPE_HIGH_CURRENT
odrv0.axis0.motor.config.pole_pairs = 4
odrv0.axis0.motor.config.calibration_current = 1.5 (tried from 0.5 to 7)
odrv0.axis0.motor.config.resistance_calib_max_voltage = 4 (tried from 2 to 10)
odrv0.axis0.encoder.config.cpr = 24
odrv0.axis0.motor.config.bandwidth = 1000
odrv0.axis0.motor.config.mode = EncoderMode.HALL
odrv0.axis0.motor.config.calib_scan_distance = 50 (I tried 150 too)
I set the controller to a ramped velocity control.
Could you please help me with proper settings? I am not able to run this motor.
FW version in Odrive is 0.5.1.1 and I use odrivetool v0.6.1.post0 on Windows.