Hello. I have an Odrive for sometime now, but I can’t make it work.
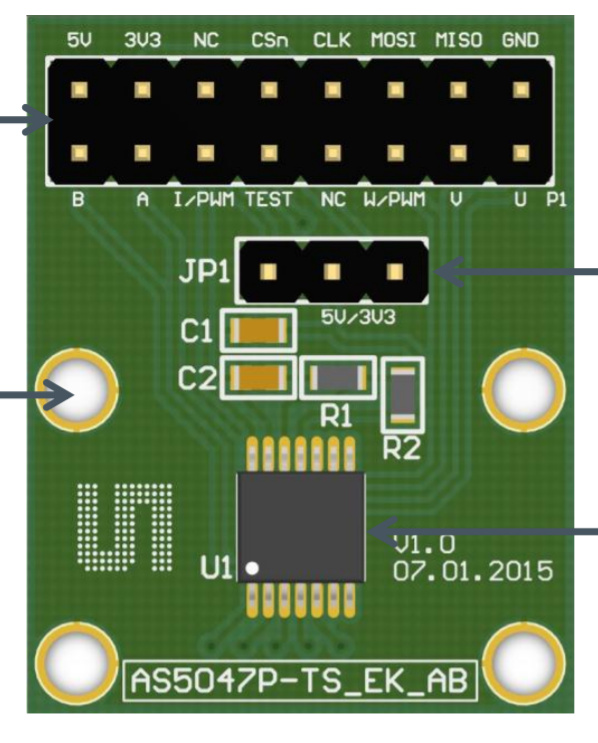
My hardware is a 24V 30A PSU, an AS5047 Encoder with the 3.3V jumper, a SK3 5065 275KV motor and I’m running ODrivetool in a Raspberry Pi 3.
Since I have been trying multiple times this time I started with a erase_configuration() and reboot(). I checked the vbus_voltage and I get 24.02. Cool.
Then I config everything according to my hardware and reading the Getting Started guide.
My odrv0.axis0.motor.config:
pre_calibrated = False (bool)
pole_pairs = 7 (int)
calibration_current = 10.0 (float)
resistance_calib_max_voltage = 2.0 (float)
phase_inductance = 0.0 (float)
phase_resistance = 0.0 (float)
direction = 0 (int)
motor_type = 0 (int)
current_lim = 10.0 (float)
current_lim_tolerance = 1.25 (float)
inverter_temp_limit_lower = 100.0 (float)
inverter_temp_limit_upper = 120.0 (float)
requested_current_range = 60.0 (float)
current_control_bandwidth = 1000.0 (float)
My odrv0.axis0.encoder.config:
mode = 0 (int)
use_index = False (bool)
find_idx_on_lockin_only = False (bool)
pre_calibrated = False (bool)
zero_count_on_find_idx = True (bool)
cpr = 4000 (int)
offset = 0 (int)
offset_float = 0.0 (float)
enable_phase_interpolation = True (bool)
bandwidth = 1000.0 (float)
calib_range = 0.019999999552965164 (float)
calib_scan_distance = 50.26548385620117 (float)
calib_scan_omega = 12.566370964050293 (float)
idx_search_unidirectional = False (bool)
ignore_illegal_hall_state = False (bool)
Save and reboot.
Then I tried odrv0.axis0.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE. Nothing happend. Not a small move, not a beep. Nothing.
In the dump errors:
dump_errors(odrv0)
axis0
axis: Error(s):
ERROR_MOTOR_FAILED
motor: Error(s):
ERROR_PHASE_RESISTANCE_OUT_OF_RANGE
encoder: no error
controller: no error
axis1
axis: no error
motor: no error
encoder: no error
controller: no error
I cannot go anything further than this.
I have read the forum, nothing works on me. I made sure than my motor and encoder are in M0 and I have check the wires.
My phisical setup is something like this:
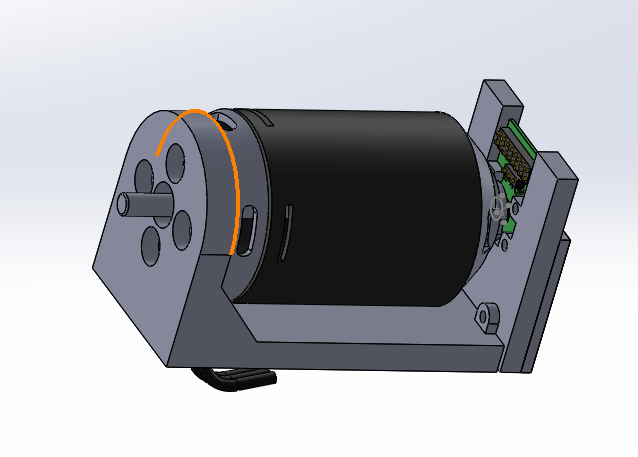
What can I do?
Thanks