Hi,
I recently started using the ODrive card and I immediately encountered a problem, namely that the motor does not move as it should.
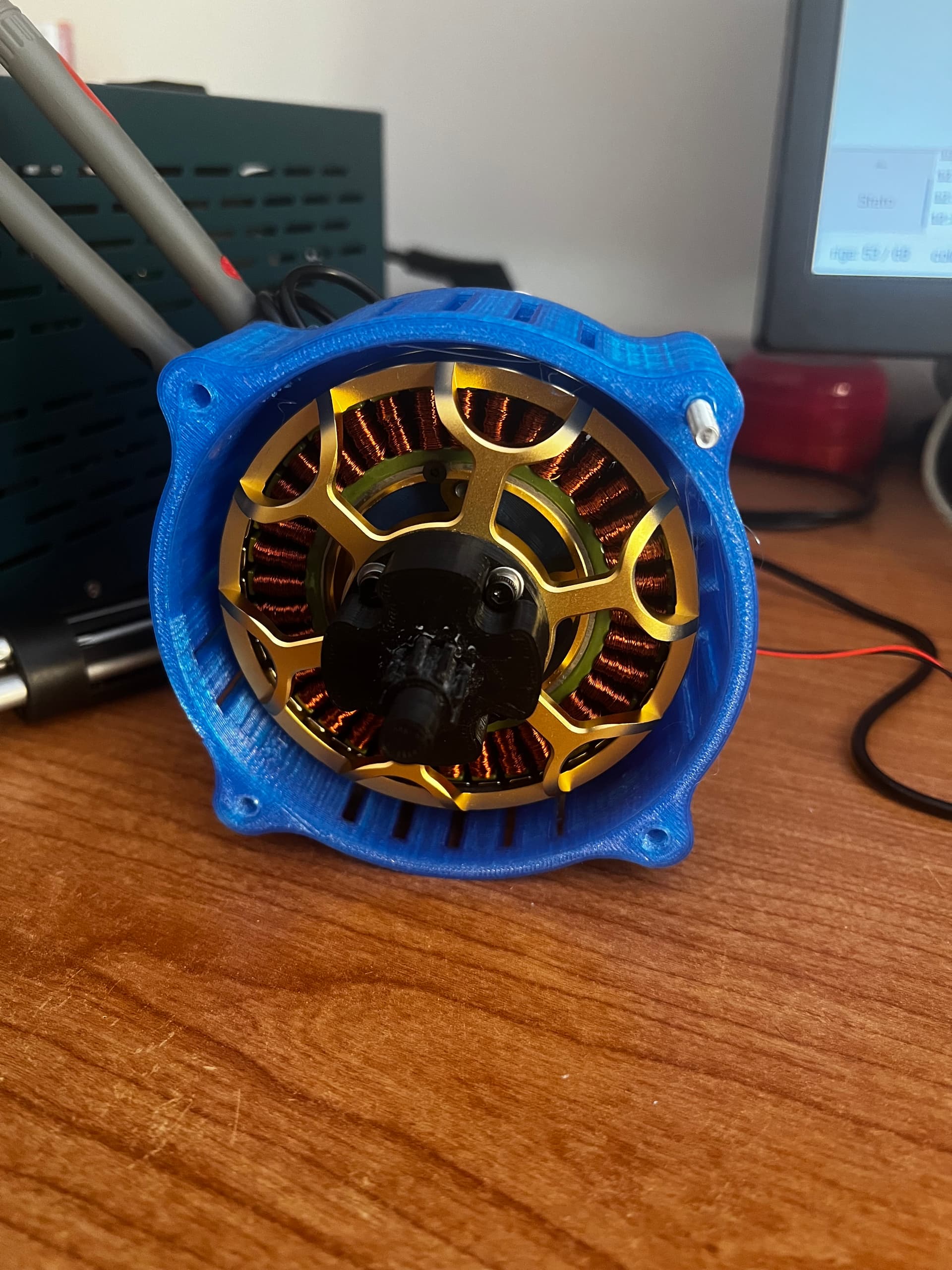
My motor is the 8308 from EaglePower (I attach photos) with KV=90 and polepairs=20, and as an encoder I use the one integrated into the ODrive board (SPI).
I ran several configuration commands, setting different parameters of the board, encoder and motor.
After saving the configuration and rebooting the ODrive board, I ran the commands to calibrate the motor (odrv0.axis0.requested_state=AXIS_STATE_MOTOR_CALIBRATION) and encoder (odrv0.axis0.requested_state=AXIS_STATE_ENCODER_OFFSET_CALIBRATION).
So far so good, as the motor beeped and started to do a half rotation to the left and right smoothly.
At this point I put the system in closed_loop and from here the problems started.
In fact, if I try to set input_pos=1 the motor tries to rotate clockwise for about 0.2, then it stops, despite the current absorption increasing.
If I try to force the movement manually I feel a lot of resistance, but if I manage to overcome it then the motor makes another turn, reaching around 0.7, if I continue to force it then it moves to the desired position.
I add that the control mode is POSITION_CONTROL and that the input mode is TRAP_TRAJ.
I can confirm that the encoder works properly, because by moving the motor by hand it accurately detects position and speed.
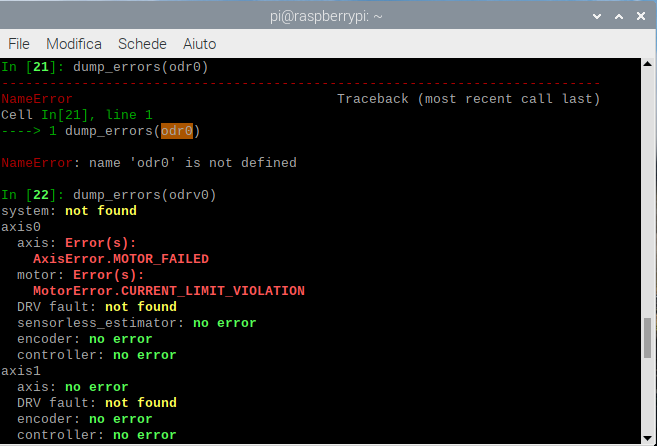
Sometimes, while I try to manually force the movement, the ODrive card goes into error and typing dump_errors(odrv0) gives me AxisError.MOTOR_FAILED, MotorError.CURRENT_LIMIT_VIOLATION (I attach photos).
I tried increasing the current limit up to 20A, but it still gives me the same error.
Can anyone tell me what the problem could be?
### odrv0.axis0 ###
clear_errors(obj: object_ref)
config:
calibration_lockin: ...
can_heartbeat_rate_ms: 100 (uint32)
can_node_id: 1 (uint32)
can_node_id_extended: False (bool)
dir_gpio_pin: 2 (uint16)
enable_step_dir: False (bool)
enable_watchdog: False (bool)
general_lockin: ...
sensorless_ramp: ...
startup_closed_loop_control: True (bool)
startup_encoder_index_search: False (bool)
startup_encoder_offset_calibration: True (bool)
startup_homing: False (bool)
startup_motor_calibration: False (bool)
startup_sensorless_control: False (bool)
step_dir_always_on: False (bool)
step_gpio_pin: 1 (uint16)
turns_per_step: 0.0009765625 (float)
watchdog_timeout: 0.0 (float)
controller:
anticogging_valid: False (bool)
config: ...
error: 0 (int32)
input_pos: -0.18436723947525024 (float)
input_torque: 0.0 (float)
input_vel: 0.0 (float)
move_incremental(obj: object_ref, displacement: float, from_input_pos: bool)
pos_setpoint: -0.18436723947525024 (float)
start_anticogging_calibration(obj: object_ref)
torque_setpoint: 0.0 (float)
trajectory_done: True (bool)
vel_integrator_torque: 0.0 (float)
vel_setpoint: 0.0 (float)
current_state: 8 (int32)
encoder:
calib_scan_response: 6146.0 (float)
config: ...
count_in_cpr: 13368 (int32)
error: 0 (int32)
hall_state: 7 (uint8)
index_found: False (bool)
interpolation: 0.5 (float)
is_ready: True (bool)
phase: -1.2461192607879639 (float)
pos_abs: 13371 (int32)
pos_circular: 0.8158073425292969 (float)
pos_cpr: 0.8158588409423828 (float)
pos_cpr_counts: 13368.4375 (float)
pos_estimate: -0.18417268991470337 (float)
pos_estimate_counts: -3016.5478515625 (float)
set_linear_count(obj: object_ref, count: int32)
shadow_count: -3021 (int32)
spi_error_rate: 0.0 (float)
vel_estimate: -0.34332275390625 (float)
vel_estimate_counts: -2250.0 (float)
error: 0 (int32)
fet_thermistor:
config: ...
error: 0 (int32)
temperature: 32.99772262573242 (float)
is_homed: False (bool)
lockin_state: 0 (int32)
loop_counter: 101607 (uint32)
max_endstop:
config: ...
endstop_state: False (bool)
min_endstop:
config: ...
endstop_state: False (bool)
motor:
DC_calib_phB: -1.3841259479522705 (float)
DC_calib_phC: -0.9646115899085999 (float)
armed_state: 3 (int32)
config: ...
current_control: ...
current_meas_phB: 0.014435529708862305 (float)
current_meas_phC: -0.0019727349281311035 (float)
effective_current_lim: 10.0 (float)
error: 0 (int32)
gate_driver: ...
is_calibrated: True (bool)
phase_current_rev_gain: 0.02500000037252903 (float)
timing_log: ...
motor_thermistor:
config: ...
error: 0 (int32)
temperature: 0.0 (float)
requested_state: 0 (int32)
sensorless_estimator:
config: ...
error: 0 (int32)
phase: 3.09071683883667 (float)
pll_pos: 3.0927751064300537 (float)
vel_estimate: 0.0016833508852869272 (float)
step_dir_active: False (bool)
trap_traj:
config: ...
watchdog_feed(obj: object_ref)
### odrv0.axis0.controller ###
anticogging_valid: False (bool)
config:
anticogging: ...
axis_to_mirror: 255 (uint8)
circular_setpoint_range: 1.0 (float)
circular_setpoints: False (bool)
control_mode: 3 (int32)
enable_current_mode_vel_limit: True (bool)
enable_gain_scheduling: False (bool)
enable_overspeed_error: True (bool)
enable_vel_limit: True (bool)
gain_scheduling_width: 10.0 (float)
homing_speed: 0.25 (float)
inertia: 0.0 (float)
input_filter_bandwidth: 2.0 (float)
input_mode: 1 (int32)
load_encoder_axis: 0 (uint8)
mirror_ratio: 1.0 (float)
pos_gain: 20.0 (float)
torque_ramp_rate: 0.009999999776482582 (float)
vel_gain: 0.10000000149011612 (float)
vel_integrator_gain: 0.0 (float)
vel_limit: 120.0 (float)
vel_limit_tolerance: 1.2000000476837158 (float)
vel_ramp_rate: 1.0 (float)
error: 0 (int32)
input_pos: -0.18436723947525024 (float)
input_torque: 0.0 (float)
input_vel: 0.0 (float)
move_incremental(obj: object_ref, displacement: float, from_input_pos: bool)
pos_setpoint: -0.18436723947525024 (float)
start_anticogging_calibration(obj: object_ref)
torque_setpoint: 0.0 (float)
trajectory_done: True (bool)
vel_integrator_torque: 0.0 (float)
vel_setpoint: 0.0 (float)
### odrv0.axis0.motor ###
DC_calib_phB: -1.342707872390747 (float)
DC_calib_phC: -0.958293080329895 (float)
armed_state: 3 (int32)
config:
acim_autoflux_attack_gain: 10.0 (float)
acim_autoflux_decay_gain: 1.0 (float)
acim_autoflux_enable: False (bool)
acim_autoflux_min_Id: 10.0 (float)
acim_gain_min_flux: 10.0 (float)
acim_slip_velocity: 14.706000328063965 (float)
calibration_current: 10.0 (float)
current_control_bandwidth: 100.0 (float)
current_lim: 10.0 (float)
current_lim_margin: 8.0 (float)
direction: -1 (int32)
inverter_temp_limit_lower: 100.0 (float)
inverter_temp_limit_upper: 120.0 (float)
motor_type: 0 (int32)
phase_inductance: 6.308084994088858e-05 (float)
phase_resistance: 0.10987522453069687 (float)
pole_pairs: 20 (int32)
pre_calibrated: True (bool)
requested_current_range: 60.0 (float)
resistance_calib_max_voltage: 2.0 (float)
torque_constant: 0.09188888967037201 (float)
torque_lim: inf (float)
current_control:
I_measured_report_filter_k: 1.0 (float)
Ibus: 0.0003000549622811377 (float)
Id_measured: -0.033946871757507324 (float)
Id_setpoint: 0.0 (float)
Iq_measured: -0.061991192400455475 (float)
Iq_setpoint: 0.1569238156080246 (float)
acim_rotor_flux: 0.0 (float)
async_phase_offset: 0.0 (float)
async_phase_vel: 0.0 (float)
final_v_alpha: -0.05308202654123306 (float)
final_v_beta: -0.0036413802299648523 (float)
i_gain: 10.98752212524414 (float)
max_allowed_current: 60.75 (float)
overcurrent_trip_level: 67.5 (float)
p_gain: 0.006308084819465876 (float)
v_current_control_integral_d: -0.01986008509993553 (float)
v_current_control_integral_q: 0.04878824204206467 (float)
current_meas_phB: 0.017633914947509766 (float)
current_meas_phC: 0.07365173101425171 (float)
effective_current_lim: 10.0 (float)
error: 0 (int32)
gate_driver:
drv_fault: 0 (int32)
is_calibrated: True (bool)
phase_current_rev_gain: 0.02500000037252903 (float)
timing_log:
adc_cb_dc: 12874 (uint16)
adc_cb_i: 3610 (uint16)
enc_calib: 9330 (uint16)
foc_current: 10490 (uint16)
foc_voltage: 9274 (uint16)
general: 46746 (uint16)
idx_search: 13453 (uint16)
meas_l: 1552 (uint16)
meas_r: 36987 (uint16)
sample_now: 1778 (uint16)
spi_end: 5266 (uint16)
spi_start: 2278 (uint16)