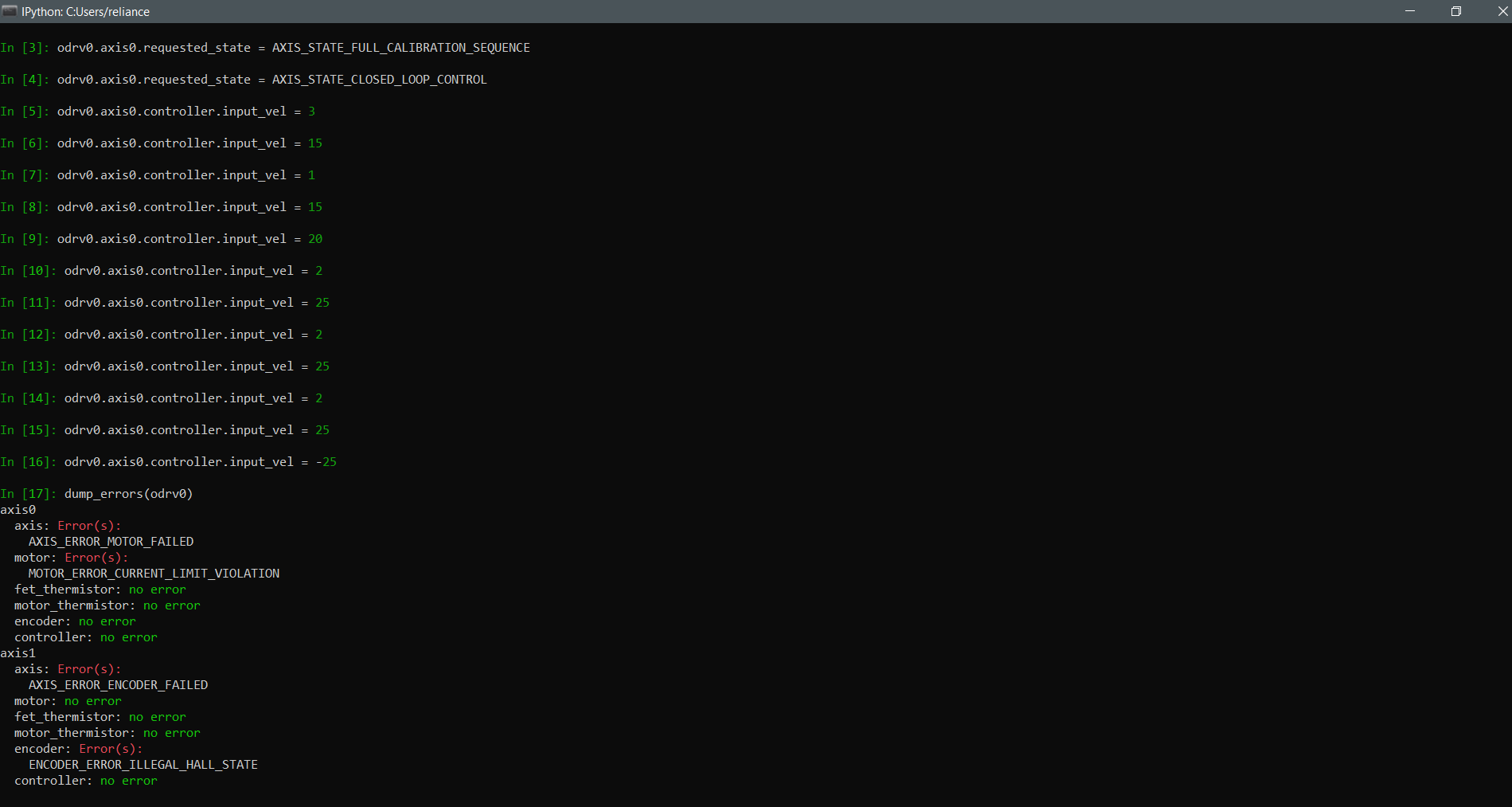
I’m facing lots of problems while dealing with ODrive. If I want to increase speed or switching the direction of BLDC Motor connected to the Odrive it shows an error of >MOTOR_ERROR_CURRENT_LIMIT_VIOLATION and
AXIS_ERROR_MOTOR_FAILDED. I attached an image of the error.
I have set the following parameter to the Odrive:
odrv0.axis0.motor.config.current_lim=37
odrv0.axis1.motor.config.current_lim=37
odrv0.axis0.motor.config.requested_current_range = 42
odrv0.axis1.motor.config.requested_current_range = 42
odrv0.axis0.controller.config.vel_limit = 4000
odrv0.axis1.controller.config.vel_limit = 4000
odrv0.axis0.motor.config.calibration_current = 7
odrv0.axis1.motor.config.calibration_current = 7
odrv0.config.brake_resistance = 0
odrv0.axis0.motor.config.pole_pairs = 14
odrv0.axis1.motor.config.pole_pairs = 14
odrv0.axis0.motor.config.motor_type = MOTOR_TYPE_HIGH_CURRENT
odrv0.axis1.motor.config.motor_type = MOTOR_TYPE_HIGH_CURRENT
odrv0.axis0.motor.config.resistance_calib_max_voltage = 4
odrv0.axis0.motor.config.current_control_bandwidth = 100
odrv0.axis1.motor.config.resistance_calib_max_voltage = 4
odrv0.axis1.motor.config.current_control_bandwidth = 100
odrv0.axis0.encoder.config.mode = ENCODER_MODE_HALL
odrv0.axis0.encoder.config.cpr = 84
odrv0.axis1.encoder.config.mode = ENCODER_MODE_HALL
odrv0.axis1.encoder.config.cpr = 84
odrv0.axis0.encoder.config.bandwidth = 100
odrv0.axis0.controller.config.pos_gain = 1
odrv0.axis0.controller.config.vel_gain = 0.05136
odrv0.axis0.controller.config.vel_integrator_gain = 0.05
odrv0.axis1.encoder.config.bandwidth = 100
odrv0.axis1.controller.config.pos_gain = 1
odrv0.axis1.controller.config.vel_gain = 0.05136
odrv0.axis1.controller.config.vel_integrator_gain = 0.05
odrv0.axis0.controller.config.control_mode = CONTROL_MODE_POSITION_CONTROL
odrv0.axis1.controller.config.control_mode = CONTROL_MODE_POSITION_CONTROL
odrv0.save_configuration()
odrv0.reboot()
And one more problem, I have to calibrate ODrive every time when I want to use it. Is there any solution for that? If yes please share with us.
Please! help us to solve these problems. Thank you.
