Hi All!
I’m tuning my Antigravity 4006 motor using the ODriveGUI, and seeing some incorrect results:

Here the motor starts in the right direction, but then jumps off. The GUI reports an unknown torque error.
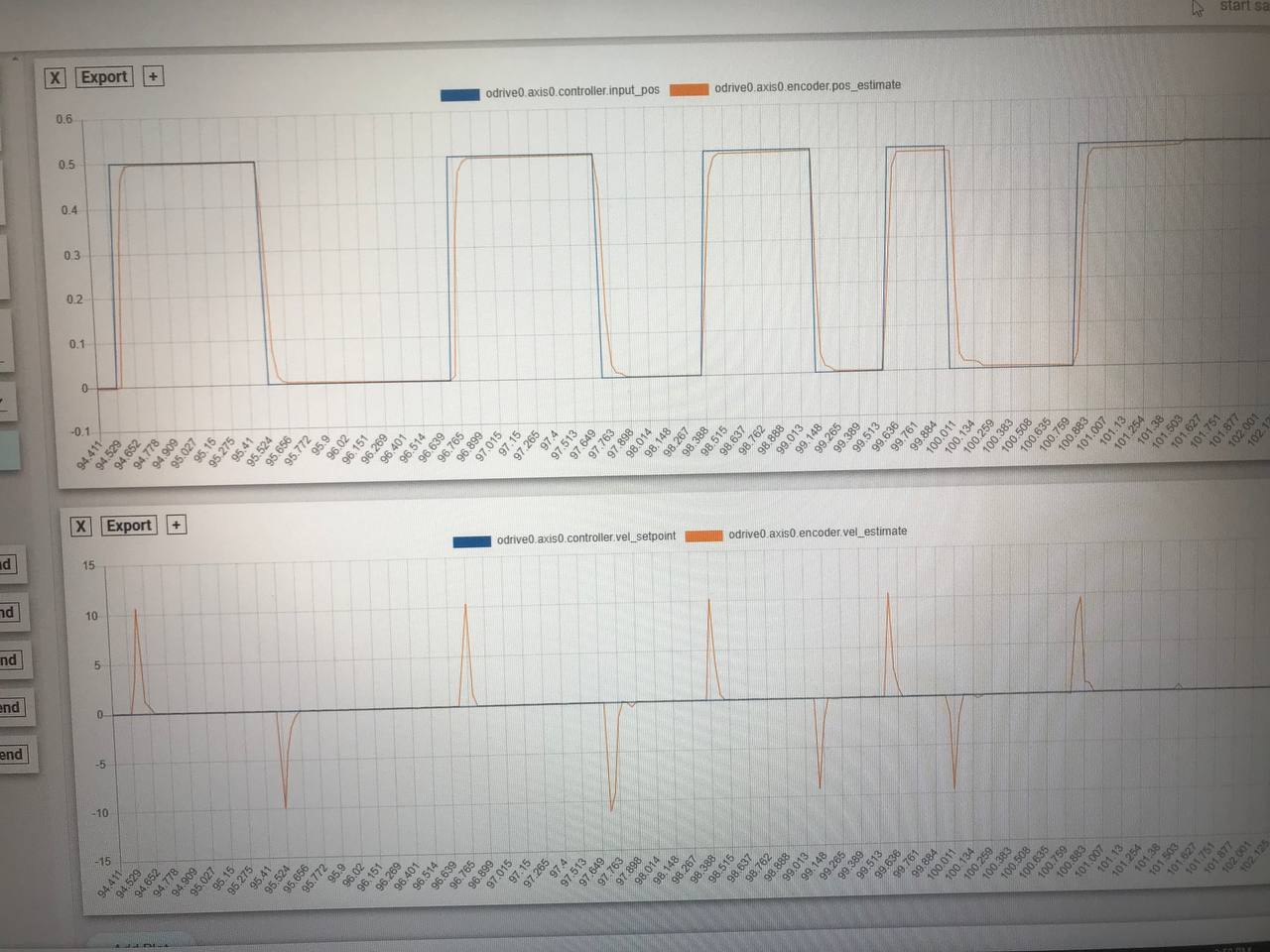
The motor works with these settings most of the time, so I’m not sure what’s causing the jump.
Thank you in advance for the help!