Hello,
I am using the Turnigy Aerodrive SK3 149Kv motor, powered by an 5000mAh 40C 6s LiPo and the Odrive 48V together with the AMT102 encoder. I am able to calibrate the motor, put in velocity control and command it to run for 5000 counts/s. However, after a few seconds the velocity drops down to zero, the current increases and the motor just oscillates a little. Then the current state goes to idle and can’t be reset to closed loop control before the odrive is not rebooted. The same behavior occurs when the motor is in position control and I want it to move e.g. 100000 counts.
The maximum current is set to 60A, motor and encoder do not show any errors, the motor does not carry any load.
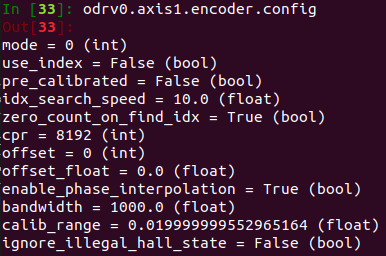
Encoder config:
 !
!
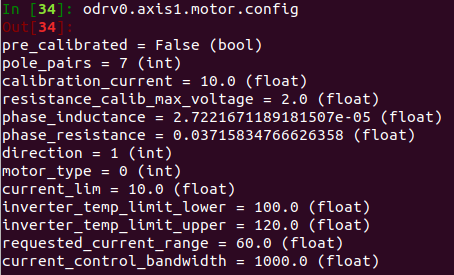
Motor config:
 !
!
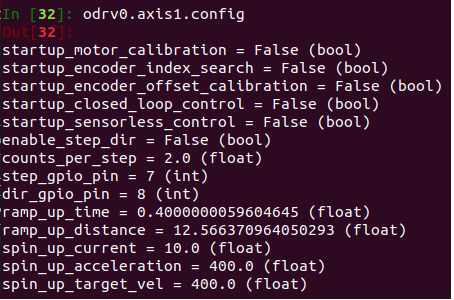
Odrive config:
 !
!