I have just started to useing ODrive and unfortunatelly, I am totally stuck right know.
I tried to manage the problem through older Forum posts, but I can not see why I can not move my motors.
Basically I would like to use 2 motors from the link below:
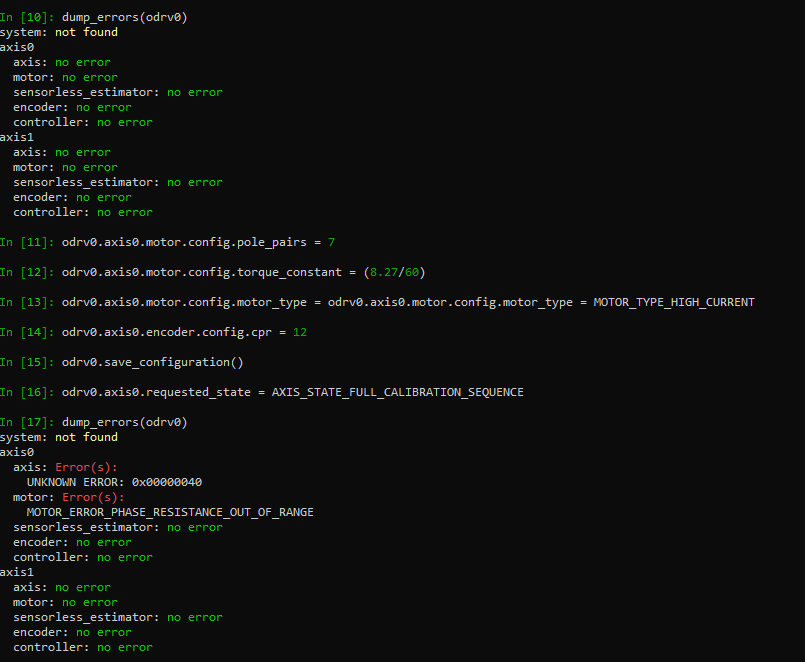
I went through the “Getting Started Guide” , However When i Ask a full calibration Sequence, I will run into the ERROR_PHASE_RESISTANCE_OUT_OF_RANGE error.
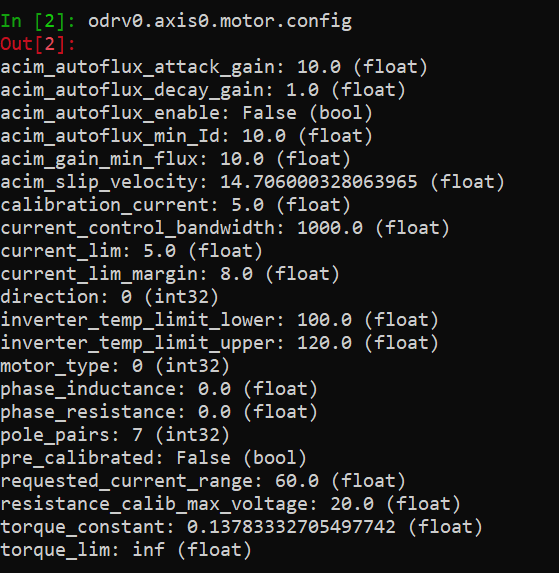
I also found out that there is a hint for common motor problems, and i absolutely see that there are problems with the resistance, but I can not see what does it exactly means
I’m not sure if this will totally fix your problem, but it looks like you don’t have updated firmware. You have a system not found error and an UNKNOWN ERROR underneath your axis. These two usually correspond to not having updated firmware, at least in my experience. Try updating your firmware with odrivetool dfu or sudo odrivetool dfu.
Right know, I managed to start the motors with some parameter tuning, and now it seems to be that they are working well.
However, right know if both of the motor starts in the application, one of them get ENCODER_ERROR_ILLEGAL_HALL_STATE state immidiatelly when the other starts. Always the first motor and as the other one starts to spin, the error code comes out… Hope that I will be able to find out that problem too.
Are you using the ferrite rings?
I think your problem is caused by noise - the motor is acting as an antenna for the high frequency components of the switching edges, and it is interfering with the Hall sensor input.
The ferrite rings will absorb those high frequencies before they reach the motor.