Just want show you my new Robotarm:

What du you think?
Just want show you my new Robotarm:
What du you think?
Don’t know why this hasn’t gotten any attention - really cool! What are you using to send commands to the ODrive? Any code you can share  ?
?
Hey, that looks really interesting. I’m currently developing something similar, but with only 4 axis.
Seems like you’re using some kind of inverse kinematics, what are you using? And same question - How do you control the ODrives? That’s the most interesting part for me
I use 3 Odrives connected from RasPi via USB.
To control the motors i build a simple python server-script that is communicate via Websocket to an Angular Frontend.
For now there was no IK. It uses input_pos and velocities as parameter.
Important to notice is that i used the “input_mode” = “TRAP_TRAJ” = 5
https://docs.odriverobotics.com/v/latest/control-modes.html#trajectory-control
This was the only way to handle the “rotational inertia”. Best explanation here:

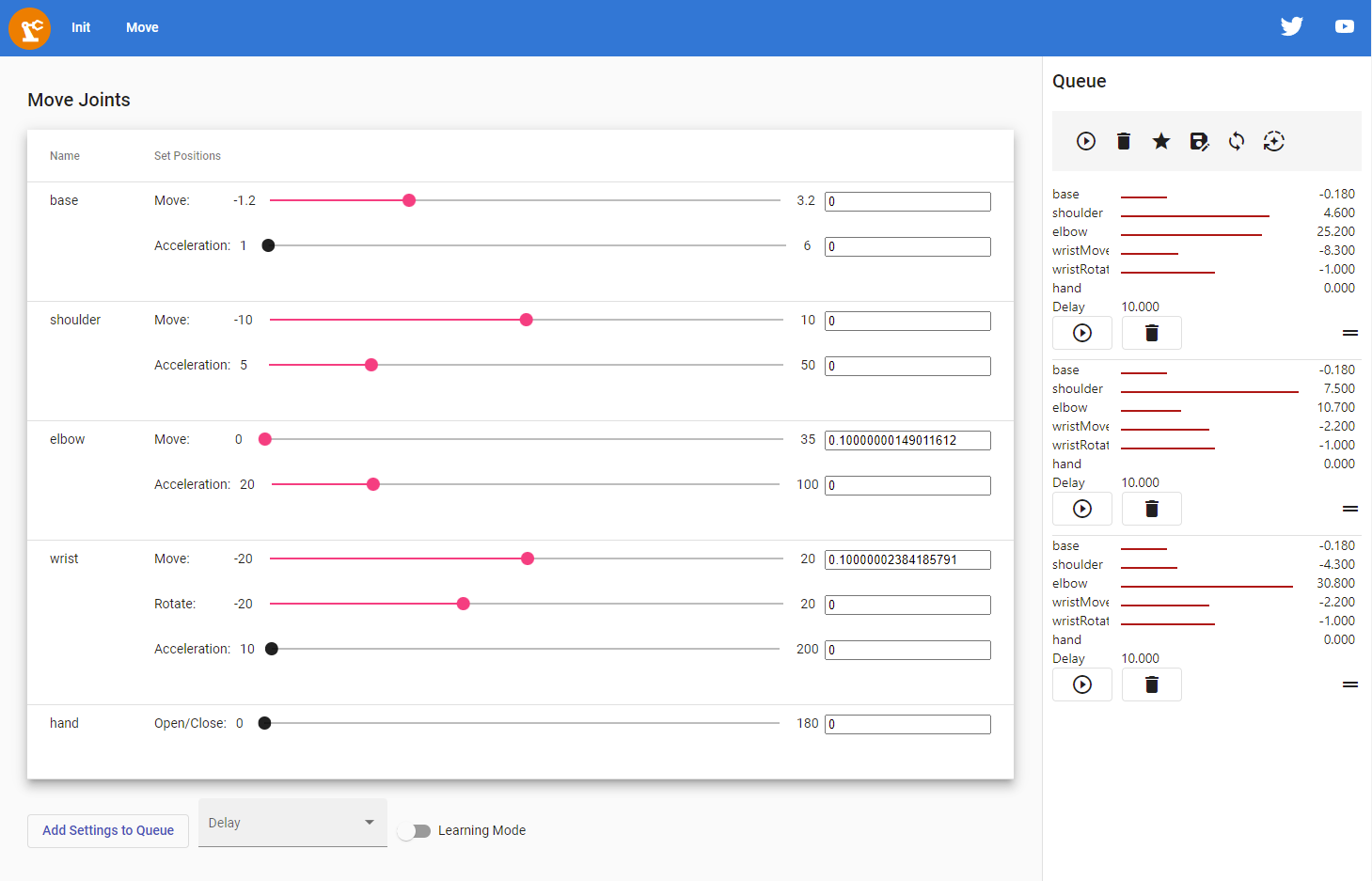
This was my Web-Frontend:
Interesting, so you basically set the position for each axis and then you press start and then every axis moves to the setpoint with TRAP_TRAJ?
In that case that’s unfortunate because that would have been the part where i also needed help.
I really like your frontend tho, looks amazing!