Dear Oskar and other ODrive enthusiasts,
I’m new to tech engineering and programming as a whole, but I saw what what you and William Osman made before makers faire. Yes, I’m referring to the shopping cart. I was inspired to make my own, but I just got my ODrive in the other day and as expected I’ve run into some problems. I’ve been attached to the getting started tab on the ODrive website but when I press enter after entering AXIS_STATE_FULL_CALIBRATION_SEQUENCE in Terminal I get very little response. The hover board wheel moves at most a centimeter and doesn’t move again. When I search for errors in the AXIS it gives me 65. But the motor error is an error 17.
In [4]: odrv0.axis0.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE
In [5]: odrv0.axis1.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE
In [6]: odrv0.axis0.error
Out[6]: 65
In [7]: odrv0.axis0.motor.error
Out[7]: 17
After doing all of this about 4-5 times I’ve reset it using this code and still no progress.
If you could help me out I would greatly appreciate it and if there’s any other problems you guys ran into while programming, I would appreciate the heads up before being surprised with another problem
motor 17 -> 0x11 means ERROR_CONTROL_DEADLINE_MISSED and ERROR_PHASE_RESISTANCE_OUT_OF_RANGE. Try to search ERROR_PHASE_RESISTANCE_OUT_OF_RANGE. Play around with motor.config.calibration_current and resistance_calib_max_voltage.
Hey Steven, I just tried imputing the ERROR_PHASE_RESISTANCE_OUT_OF_RANGE. And I got a lot of NameErrors, is this because I don’t have the latest firmware? Although I do have the latest ODrive v3.5 model.
Reconnected to ODrive 2062359C3748 as odrv0
In [3]: odrv0.axis0.encoder.config.use_index =True
In [4]: ERROR_PHASE_RESISTANCE_OUT_OF_RANGE
NameError Traceback (most recent call last)
/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages/fibre/shell.py in ()
----> 1 ERROR_PHASE_RESISTANCE_OUT_OF_RANGE
NameError: name ‘ERROR_PHASE_RESISTANCE_OUT_OF_RANGE’ is not defined
In [5]: motor.config.calibration_current
NameError Traceback (most recent call last)
/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages/fibre/shell.py in ()
----> 1 motor.config.calibration_current
NameError: name ‘motor’ is not defined
In [6]: resistance_calib_max_voltage
NameError Traceback (most recent call last)
/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages/fibre/shell.py in ()
----> 1 resistance_calib_max_voltage
NameError: name ‘resistance_calib_max_voltage’ is not defined
In [7]: motor.config.calibration_current and resistance_calib_max_voltage
NameError Traceback (most recent call last)
/Library/Frameworks/Python.framework/Versions/3.7/lib/python3.7/site-packages/fibre/shell.py in ()
----> 1 motor.config.calibration_current and resistance_calib_max_voltage
NameError: name ‘motor’ is not defined
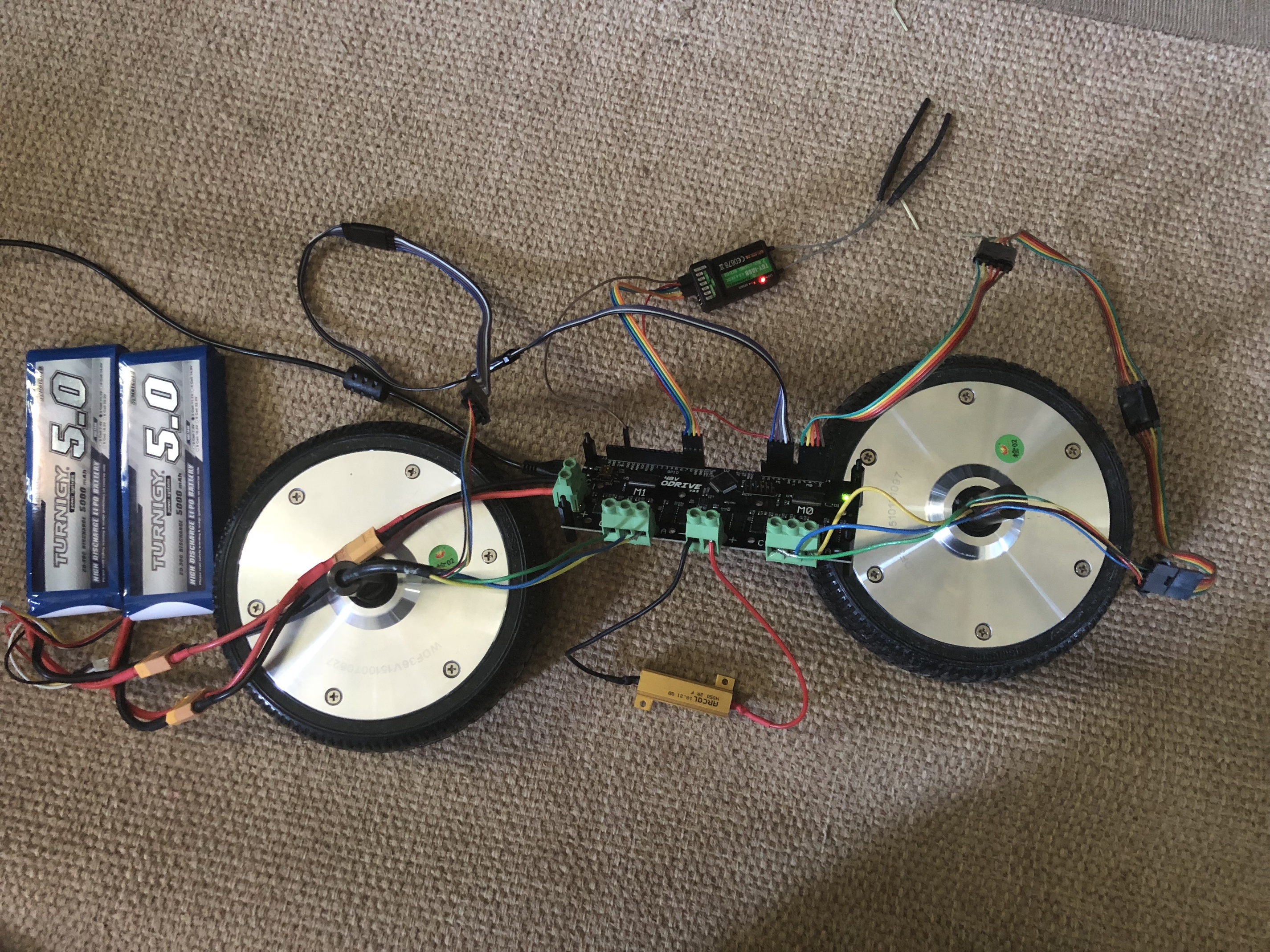
trying to upload a pic of config, but not sure if this works yet
so you don’t put in the error into the tool command line, I was just trying to tell you what the error code means. you can search on this forum about ERROR_PHASE_RESISTANCE_OUT_OF_RANGE. and depends on what odrive shows up on the terminal, and what axis you are using, it will be something like odrv0.axis1.motor.config.calibration_current
Hi,
Today we released the new version of the firmware, and with that comes support for hoverboard motors, they were not officially supported before.
You can check the hoverboard guide in the documentation.
You will need to upgrade your firmware to fw-v0.4.2, instructions here.
Wow, lots of great information in the hoverboard guide - is that linked from anywhere?