Hi everybody,
I am having problems trying to connect my ODrive to a Raspberry Pi model 4B.
I am powering the ODrive with a 6s LiPo battery and the Raspberry Pi with its dedicated power supply. The ODrive successfully performs its startup automatic calibration sequence when powered.
When I try to launch odrivetool I get the following error:
" [USB] Could not open USB device: -3 "
I am using also a wireless mouse, which is also connected via USB, and it is working properly. Removing it from the USB port does not alter the error.
Can someone provide me with some help?
Thanks in advance
Just for completeness, I tried the lsub command and the ODrive is correctly recognized:
“Bus 001 Device 008: ID 1209:0d32 Generic ODrive Robotics ODrive v3”
Apparently it was really a stupid problem. On my main pc running on Lubuntu this was not necessary, however on Raspbian I needed to use superuser privilegies. This solved the issue
1 Like
Hi AndP1b6e6,
I’m facing the exact same problem you recently solved, however I can’t seem to be able to use superuser privilegies, what exactly have you done to get around this problem ?
Thanks in advance and have a nice day,
Simon
Hi Simon,
The solution was to simply run “sudo odrivetool” instead of “odrivetool” in terminal (if your’ re using a Linux distribution).
Hi AndP1b6e6,
Thanks for your answer. My case is slightly different, I’m able to connect to my Odrive through the terminal, but I get the USB error only when I try to program the Odrive via a Python script (see below).
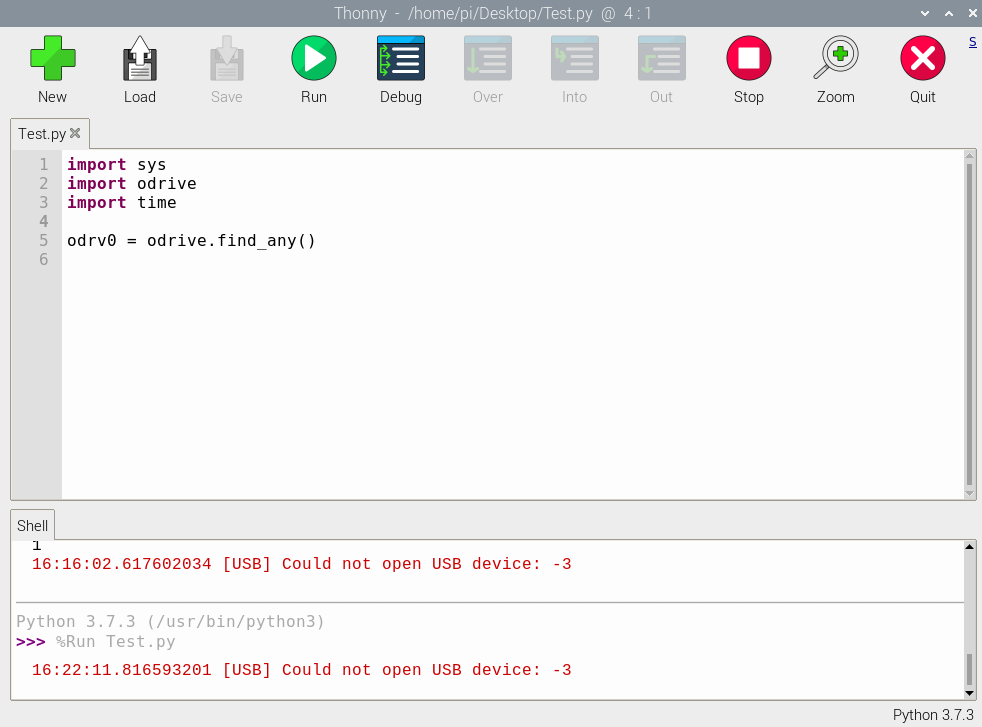
Any idea ?
Anyway thank you for your help !
Simon
1 Like
Hi Simon,
Unfortunately I’ve never used the ODrive through Pyhton and I only plan of using it via CAN.
Right now I have very little free time; however, if no one will come up with a solution for you, I’ll try to test it via python hoping I’ll be able to help you. Give me a couple of days
I am having the same issue as @Simon. I am using the Odrive with python and gat the same USB error. If you have any other ideas of what I could try that would be really helpful.
Hi Simon,
I am working on similar project
my Odrive is properly working on terminal using odrivetool but i want it to move when i launch, i am working with ROS2, can you help me ?
What do you mean “move when I launch”?