I followed the Getting Started and the Hoverboard Motor Setup to get my BLDC motors to work in Velocity Mode but I am not able to get any output.
The calibration is successful and the motors behave the way they are supposed to be. After the full calibration,
I give the commands
In [68]: odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
In [69]: odrv0.axis0.controller.input_vel = 2
but nothing happens.
On dump_errors(odrv0) I get
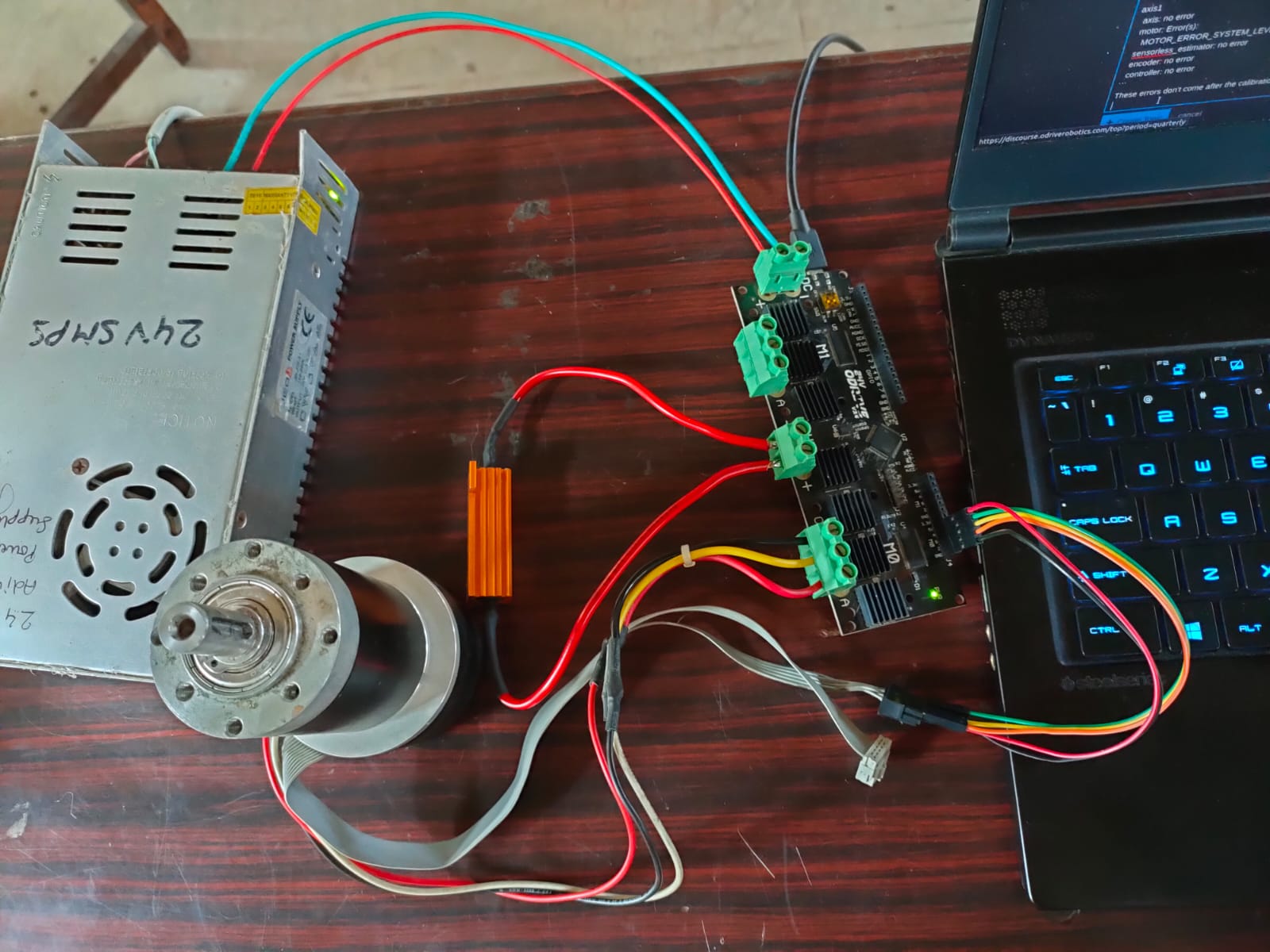
system: Error(s):
ODRIVE_ERROR_DC_BUS_OVER_REGEN_CURRENT
axis0
axis: no error
motor: Error(s):
MOTOR_ERROR_SYSTEM_LEVEL
sensorless_estimator: no error
encoder: no error
controller: no error
axis1
axis: no error
motor: Error(s):
MOTOR_ERROR_SYSTEM_LEVEL
sensorless_estimator: no error
encoder: no error
controller: no error
These errors don’t come after the calibration so It cant be that. What am I doing wrong?