I am currently using an odrive 3.6 for 2 of my projects, but I am encountering a very strange problem as I set the brake resistance into 2 ohm, it heats up once I connect the power supply, does anybody know why and give any suggestion?
regards
cyrus
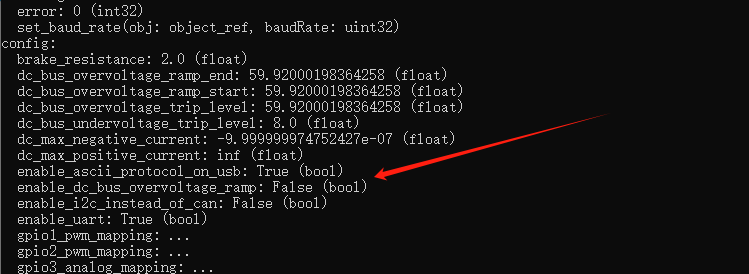
Have you enabled overvoltage feedback ramp? That could do it.
what is it pl?
what does it mean?
regards
I checked last night, it was set false
does it mean the mos driver for brake was broken?
So you’re saying that the moment you connect the ODrive to power, the brake resistor starts heating? Can you post some pictures of your wiring?
I am sorry, I don’t have any wiring pic with me to share, but the brake resistor is connected to the AX terminal tho.
more correctly is when the resistor is connected, and the value is set on the odrivetool, only connection was not causing heat up
Strange. Have you updated your ODrives firmware to latest?
no, I am only able to use 0.5.1 since it’s the only version supports dual hall sensor motor tho
I had notice there is a key word of brake duty cycle, is there any command for braking pl?
That’s for the brake resistor. Closed loop control will try to move the motor to the designated speed as fast as possible, you’ll need to change torque_soft_max/torque_soft_min, or command in torque mode, if you want to accelerate/decelerate with a specific torque
thanks for replying first of al
said if we dont connect the brake resistor to the odrive, the regenerate current will be fed back to the dc bus then to the battary or power source right?
but the key is, as mentioned before, is it possible to give a torque command to the odrive in position mode?
for hall sensored motor tho
thanks for your feedback, have a nice day
Correct, if there’s no brake resistor then 100% of braking current will be fed back to the DC bus.
You can give a torque feedforward in position mode, but generally that’s only if you have a preprogrammed trajectory or a known holding torque – not something too useful for 90% of cases, especially in yours. You probably just want to give torque commands.