Hi All,
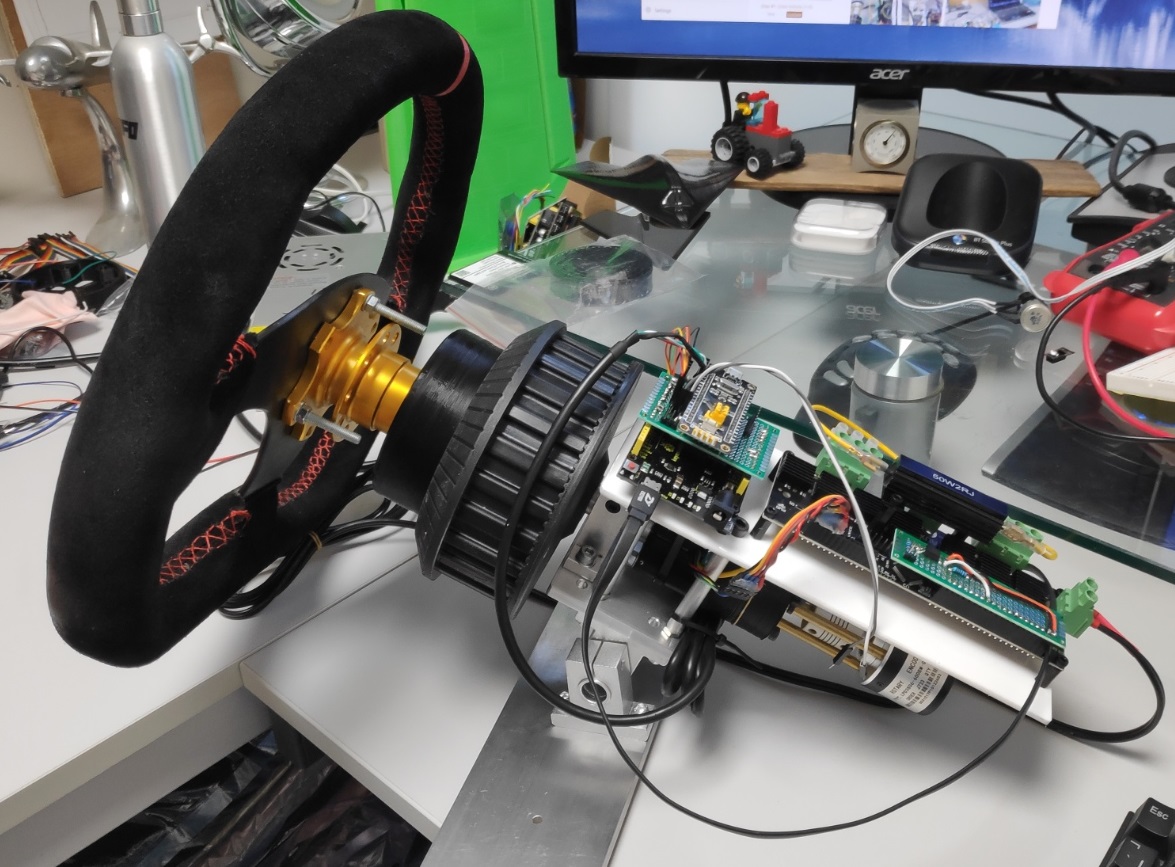
Just posted a query about optocouplers and the ODrive then it occurred that you might like to see the wheel as it stands. Happy to answer any questions you have, I’ll be posting videos about this build on my YouTube channel in the (hopefully near) future.
Really interesting project, I thought too to use odrive system but belt driven instead of dd to get more torque. What do you think about? How’s going your project?
Hi @daniele_issia
I’ve not progressed the build much recently as I’ve been trying it out in a few racing sims. So far I’m really happy with how it is working, it feels like the wheel is communicating useful information as I can drive better with feedback enabled than with it disabled.
A friend has a Logitech G29 so I’d like to do some back to back comparisons to see how it feels when we’re allowed to mix households again.
In terms of torque I’m only running the wheel on 12v initially but I can go up to 56v. At 12v the wheel is strong enough to make my arms tired and my hands sore after an hour in the sim so I guess its got a reasonable torque. based on internet research of these motors I should be able to get 12Nm from it at 36v without needing to actively cool the motor, but I haven’t made any measurements yet.
There is some slight cogging but I think that’s because I’m using the built in motor hall effect sensors for the ODrive. I intend to use the much higher resolution rotary encoder for both the ODrive and the Arduino once I’ve figured out how to isolate the two inputs from each other whilst connected to a single source.
Anyway I hope that’s of interest. Have a great new year!
Yes Barry it’s interesting, thank you for share your experiences. I would like to know which motor are you using and how have you coupled it with the wheel. I’m curious also about the “pulley like” part behind the wheel what is it?
Looks awesome.
May I ask you some basics?
Have you flashed your Arduino with the EMC FW?
What motor and PS do you use?
Do you use PWM from the Arduino to control the ODrive?
Hi @Tobi The emc firmware is on a Leonardo, and I have an intermediate Arduino that takes industrial PWM and converts it to RC PWM.
Newer versions of emc do servo output directly.
All the best
Barry M