I have been working with ODrive S1 to drive a BLDC with hall sensors. I am trying to build a winch. Previously, I have been able to get ramped velocity control working with this board and motor. I recently changed from 12V to 24V to run at higher speeds. Now, I can only run at the no load speed regardless of what my velocity input is. I am able to slow it down a tad if I put my input velocity as 1 turn/s or less but then I usually get a spinout error. I upped the electrical/mechanical spinout power thresholds to avoid this.
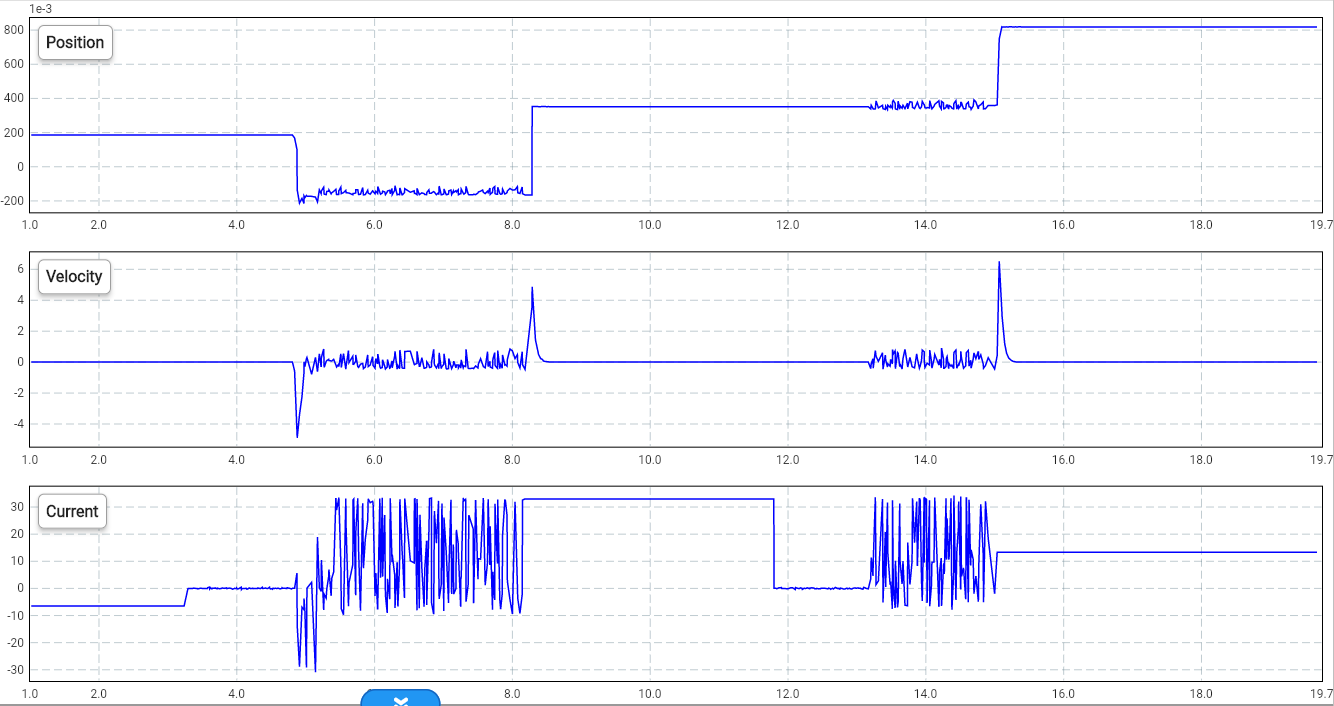
In addition, the sample window is showing noisy jibberish for position, velocity, and current while the motor is running. See below. It is noisy while I am running and the position jumps. I have not wrapped the hall sensor wires in shielding, but I have verified the wiring.
I’m not sure if anyone has seen this issue before. I’ve been trying to tune the motor but I went back to default parameters because I can’t get consistent control without a load.