I am using ODrive S1 in position control. I have typical setup , where I want to lift 30-40Kg up/down till height of 1 meter at fast as possible. Where I am using gerbox and belt attachment.
I have enabled position control. But drive goes into fault like undervoltage/overvoltage/spinout error etc.
I am able to do position control at slow speed.
I want to do it at maximum speed. Also after reaching set position drive should stop position control (to save power). I dont need position accuracy.
How to do it?
Hi! Could you please let me know some information?
- What power source are you using? Power supply? Battery? Any information or part numbers for the specific supply/battery would be great to have.
- Are you using the brake resistor with the S1?
- What motor and encoder are you using?
Hi! Following up on this!
- We are using 48VDC SMPS from Meanwell with 50A rating.
- We are using same resistor that received with controller i.e. 2ohm 50W
- We have not used any external encoder. We are dependent on Internal Hall Sensors. motor is BLDC with 4 Poles
Hall sensors are very very very low resolution, and will not give good results at all in position control. I strongly recommend you add an additional encoder. The ODrive S1 can use an incremental encoder in conjunction with the hall encoder to improve both positioning accuracy as well as the motor commutation accuracy, so you could connect even a very cheap incremental encoder such as this one or an AMT102.
The spinout error is happening because of the rapid acceleration combined with the low resolution of hall sensors. You can see this article for more information: Controller — ODrive Documentation 0.6.11 documentation
I would recommend increasing the spinout thresholds:
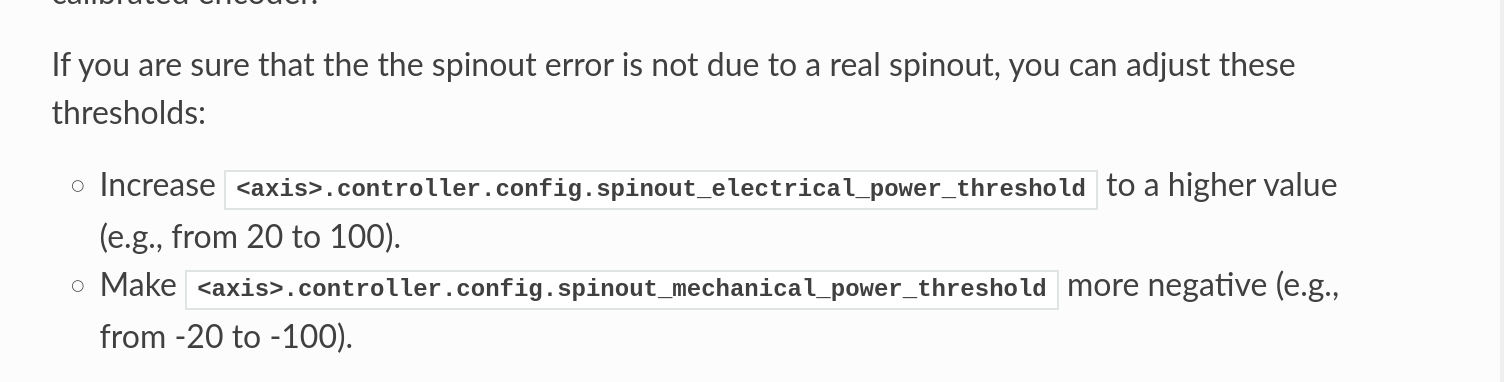
You can additionally change to using trajectory control to better manage the acceleration and deceleration, which can help with both the spinout, overvoltage, and undervoltage errors.
Additionally, regarding the overvoltage and undervoltage errors, those are difficult to diagnose in a vacuum. Can you please provide the following to me?
- Images of your wiring, especially from the power supply to the ODrive, as well as the ODrive to the motor and the ODrive to the brake resistor
- The configuration of your ODrive, either via a screenshot from the GUI python commands output, or by running
odrivetool backup-config config.jsonand then pasting theconfig.jsonfile here.
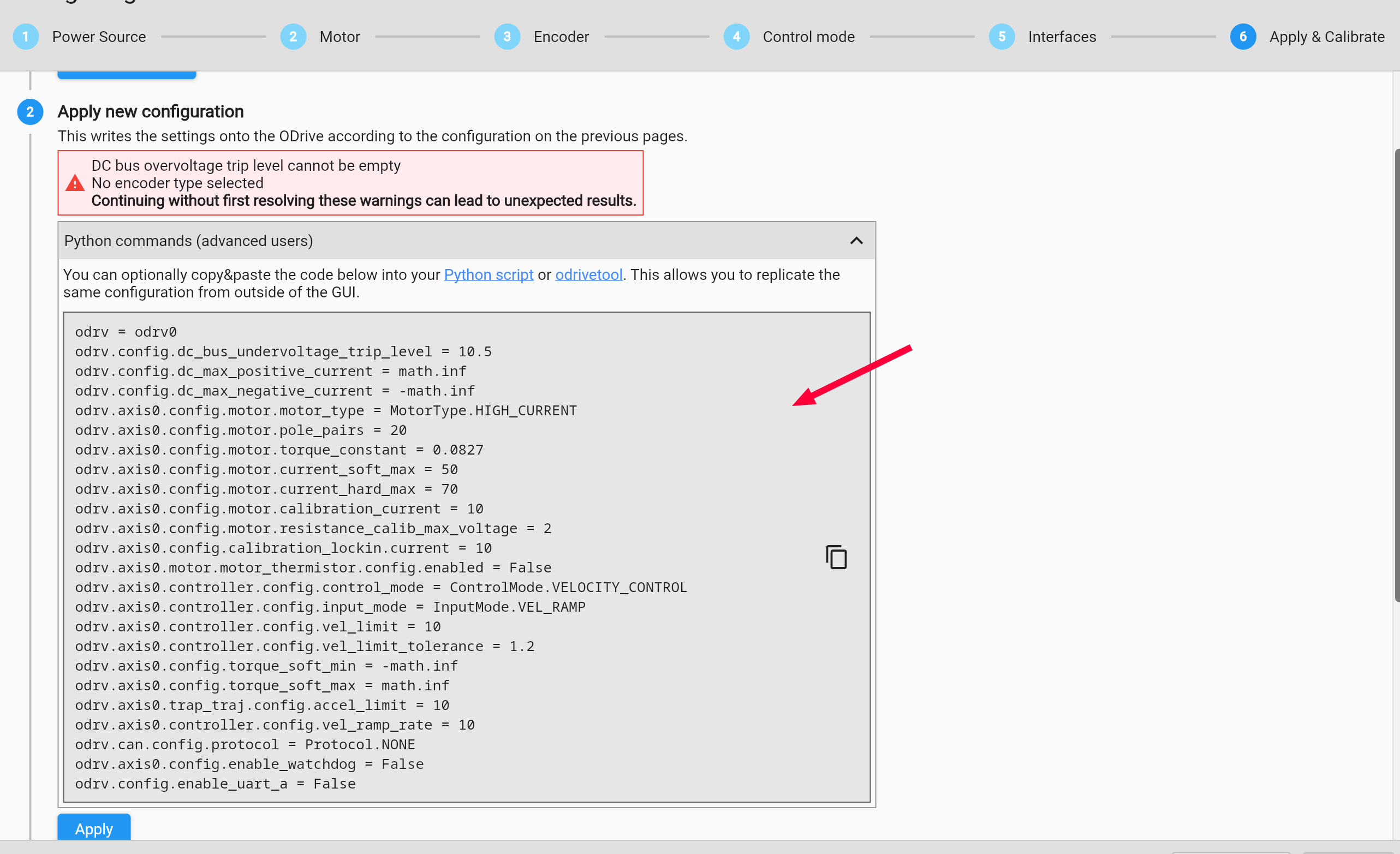
If you have ODrivetool, then the odrivetool backup-config config.json method is much more preferred.