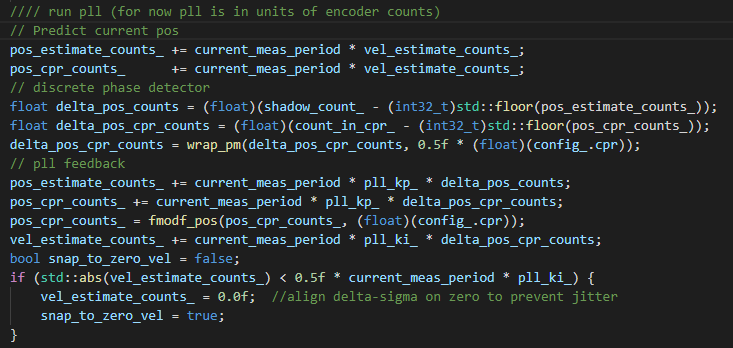
Hi,I am learning Odrive source code for a few days.Here I have a problem with the Encoder::update() function.In the function, I can not understand the part with picture follow .
Oh,thank you so much!
Hi,I am learning Odrive source code for a few days.Here I have a problem with the Encoder::update() function.In the function, I can not understand the part with picture follow .
Oh,thank you so much!