Hello all, I have been looking at multiple forum responses/questions and have tried various things.
I am currently just trying to simply get a motor (MAXON 509366 configuration which as an additional gearhead) running. But I keep getting phase_resistance_out_of_range and phase_inductance_out_of_range while keeping this in mind:

And yes my terminal connections are making contact with the phase wires and not the insulation.
Nominal Voltage: 48V
Nominal Current: 1.56A
Terminal Resistance: 2.37ohms
Pole Pairs: 2
My supply can support 48V and up to 21 Amps
I am using an Odrive 3.6V
I did the following steps (I have my motor connected to axis 1 btw)
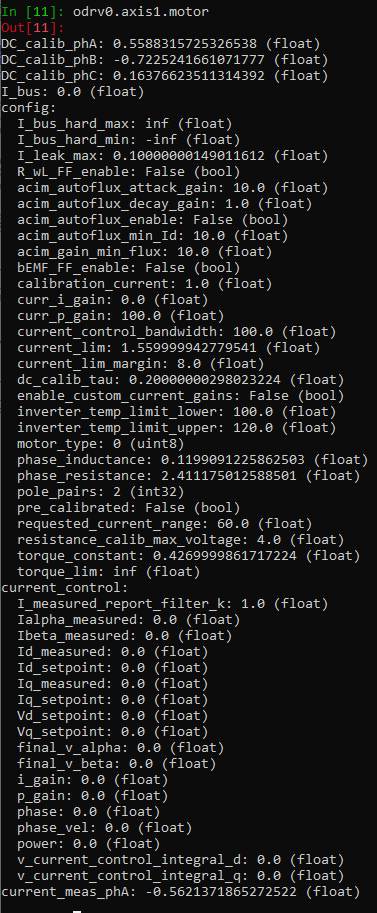
MOTORTYPE = 0 (HIGH CURRENT)
- odrivetool
- odrv0.axis1.motor.config.resistance_calib_max_voltage = 4 //I know that this can be no more than 1/2 supply voltage
- odrv0.axis1.motor.config.current_lim = 1.56 //10 is default
- odrv0.axis1.motor.config.pole_pairs = 2 //1 is default
- odrv0.axis1.motor.config.calibration_current = 1 //default 10
- odrv0.axis1.motor.config.motor_type = 0
- odrv0.axis1.controller.config.vel_limit = 135 //default is 2
- odrv0.axis1.requested_state = AXIS_STATE_MOTOR_CALIBRATION
- odrv0.axis1.motor //to check values
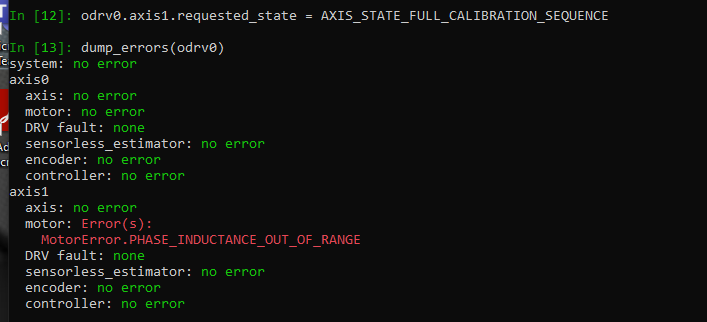
- odrv0.axis1.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE
- dump_errors(odrv0)
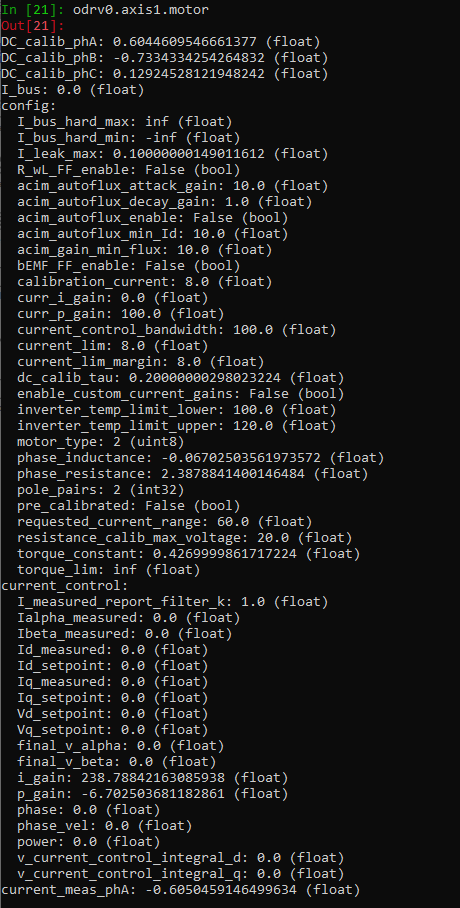
MOTOR TYPE : 2 (GIMBAL since we are greater than 1 ohm)
This was taken into consideration from odrive website : For gimbal motors, it is recommended to set the config.calibration_current and config.current_lim to half your bus voltage, or less.
- odrivetool
- odrv0.axis1.motor.config.resistance_calib_max_voltage = 20 //I know that this can be no more than 1/2 supply voltage
- odrv0.axis1.motor.config.current_lim = 8 //10 is default
- odrv0.axis1.motor.config.pole_pairs = 2 //1 is default
- odrv0.axis1.motor.config.calibration_current = 8 //default 10 (took into consideration the maxvolt > calcurrent * phaseresistance)
- odrv0.axis1.motor.config.motor_type = 2 //GIMBAL just because we are higher resistance
- odrv0.axis1.controller.config.vel_limit = 135 //default is 2
- odrv0.axis1.requested_state = AXIS_STATE_MOTOR_CALIBRATION
- odrv0.axis1.motor //to check values
- odrv0.axis1.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE
- dump_errors(odrv0)
(my motor starts to try and move and I hear gear like sounds)
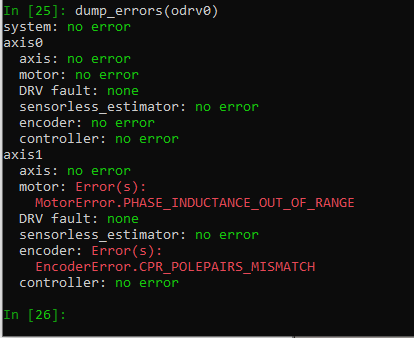
Any suggestions on what I could change? I feel like I’m pretty close and was wondering if taking the GIMBAL approach is the safe/best way to run this motor.