Hi, we are having significant problems with odrive’s position mode. Basically, around 50% of the time when I arm(put into closed loop control) an axis or set a input Pos the axis will blow past the input pos and continue indefinitely. I am using a 24v board V3.6 on 0.5.2, and the latest odrivetool. I am using the CAN interface to change axis states, set control mode and input mode, and set input_pos. CAN commands are sent from a MCP2515 with a baud rate of 500kbps.
We have a suspicion the issue may be noise/encoder related in some way. So I replaced our encoder(AMT102-V) lines with shielded Cat5e, put a ferrite ring on one of the motors, and put a low esr 2200uf Cap on the PSU output. Despite this, the problem persists.
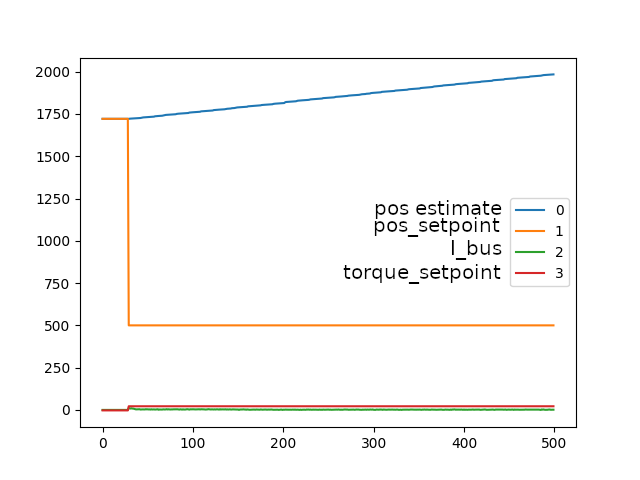
(Erroneous behavior captured on plotter)
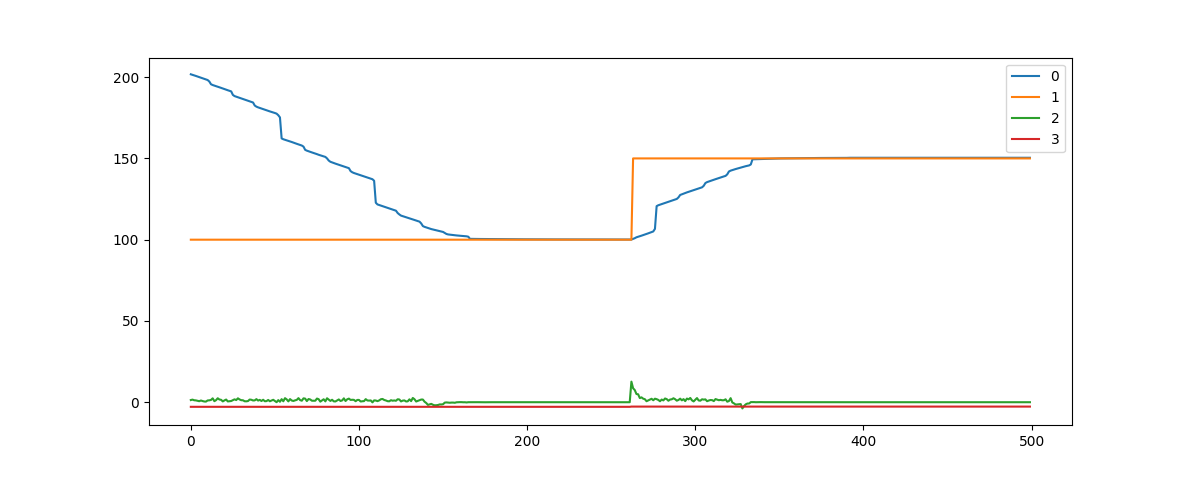
(Expected behavior)

(AXIS0 mount)
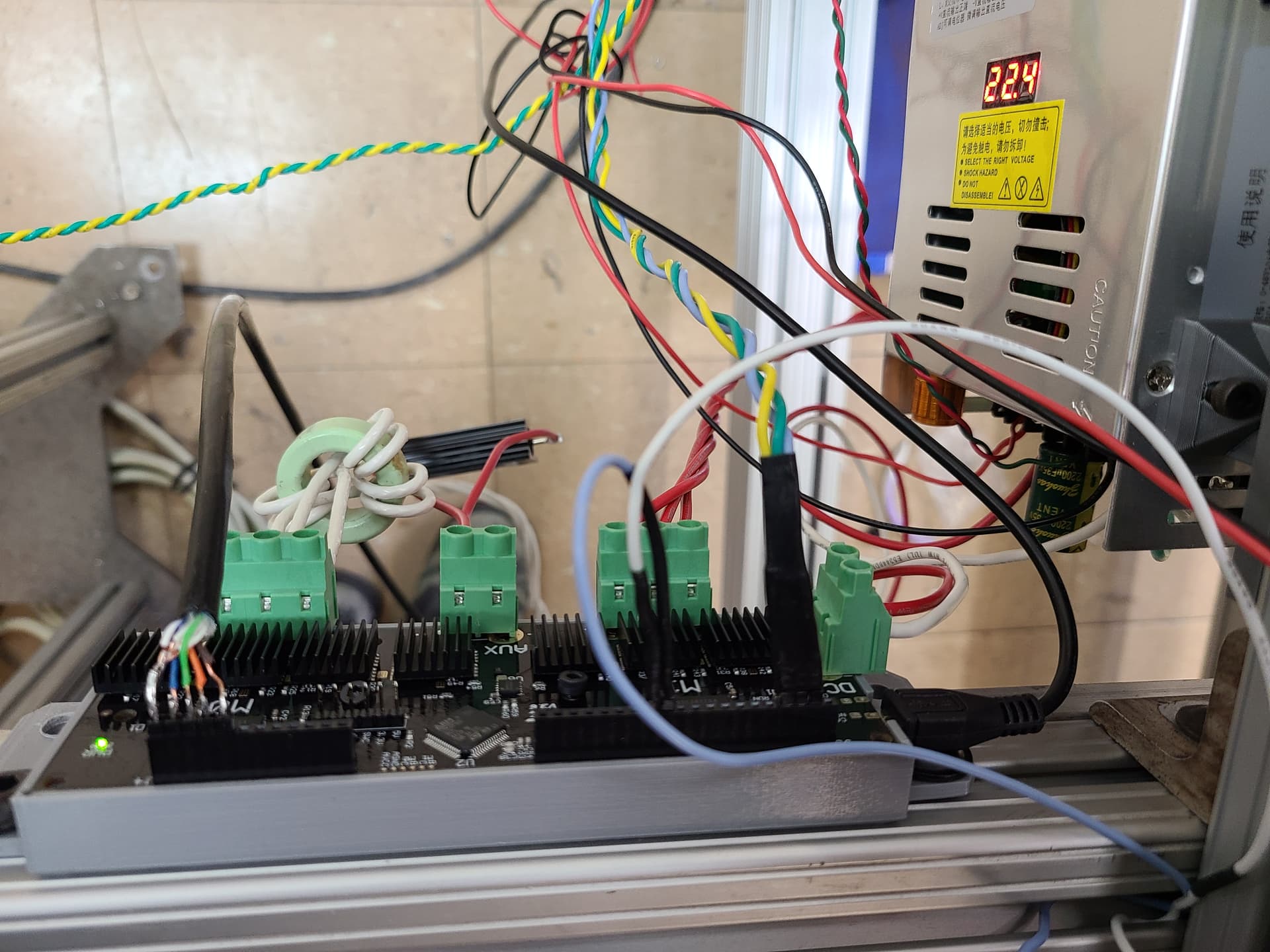
(Our Odrive (Without the other axis and encoder attached))
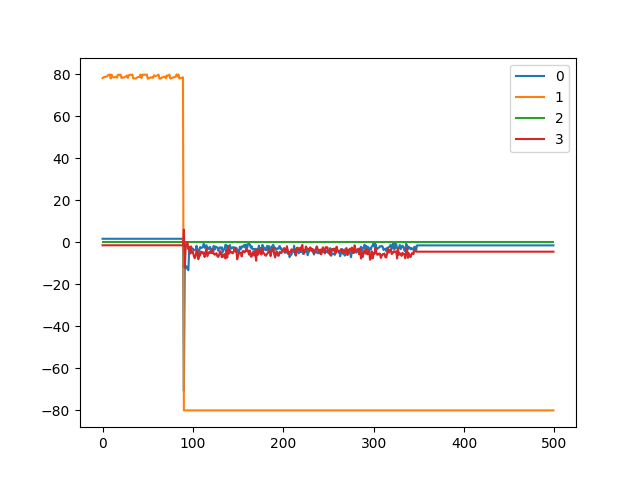
(1:Iq_measured, 2: Iq_Setpoint, 3:Id_Setpoint, 4:Id_measured)
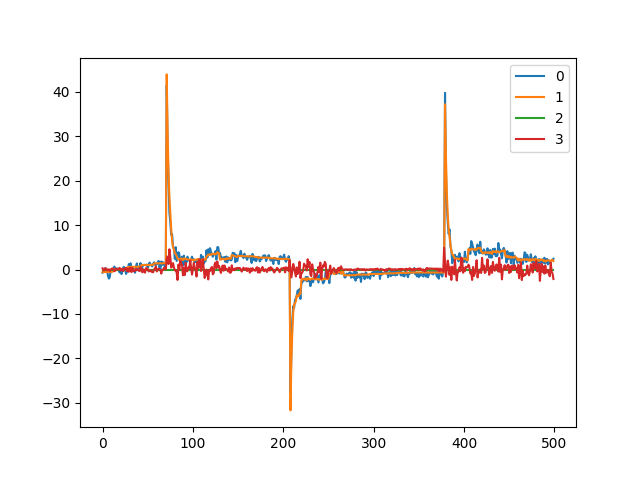
(Expected Iq Behavior)
(1:Iq_measured, 2: Iq_Setpoint, 3:Id_Setpoint, 4:Id_measured)
Any suggestions or help would be greatly appreciated, thanks!