I’m trying to control a motor (27 slots, 30 poles) at 0.1 rev/s with an AS5304 encoder (6880 encoder counts per revolution). At low speeds I get the following output:
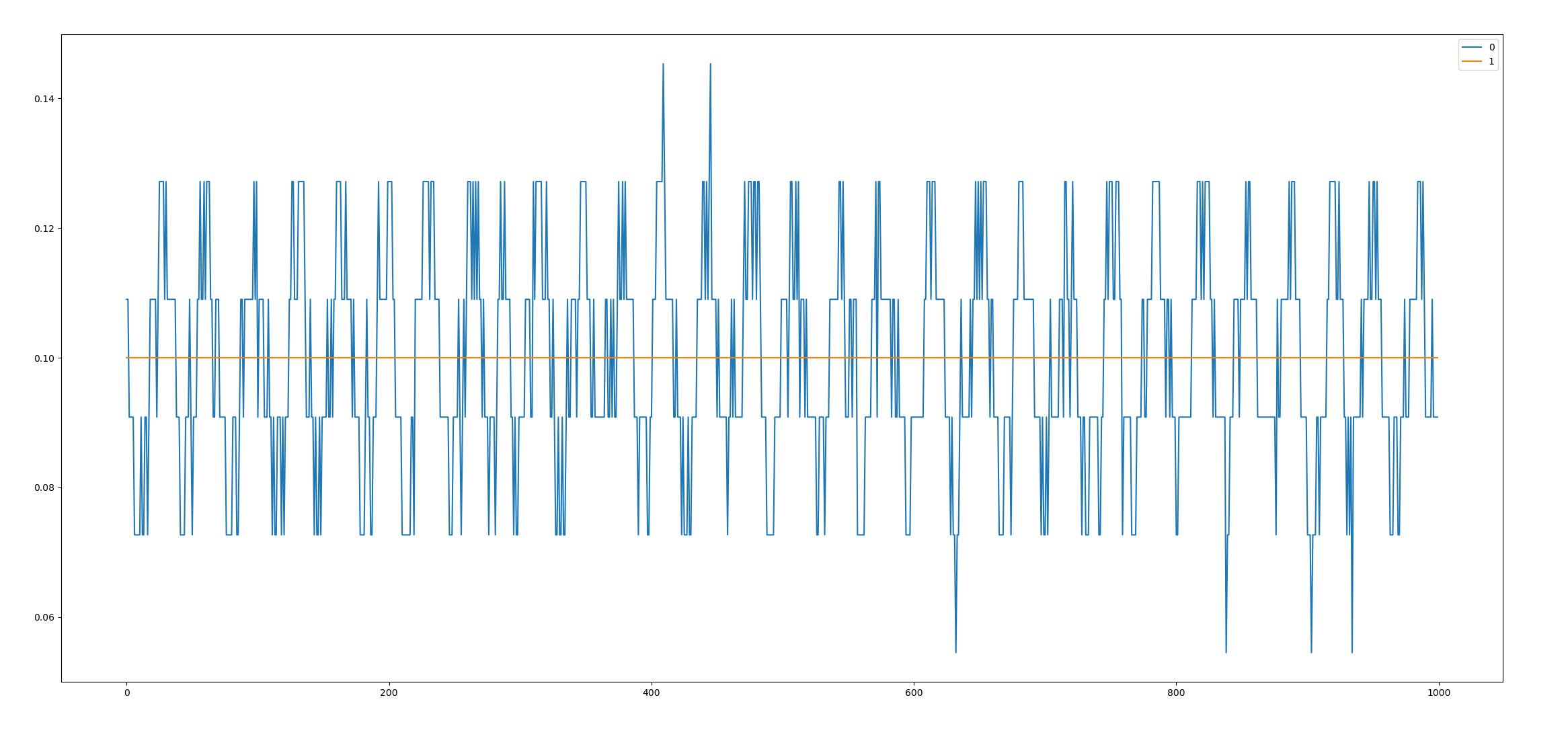
blue is
vel_estimateorange is
vel_setpoint
The vel_estimate plotted in the graph seems to have discreet jumps that are linked to the encoder bandwidth parameter.
Decreasing this bandwidth parameter from 1000 to 500 seems to improve the velocity estimate resolution, but still doesn’t improve the steady state oscillation.
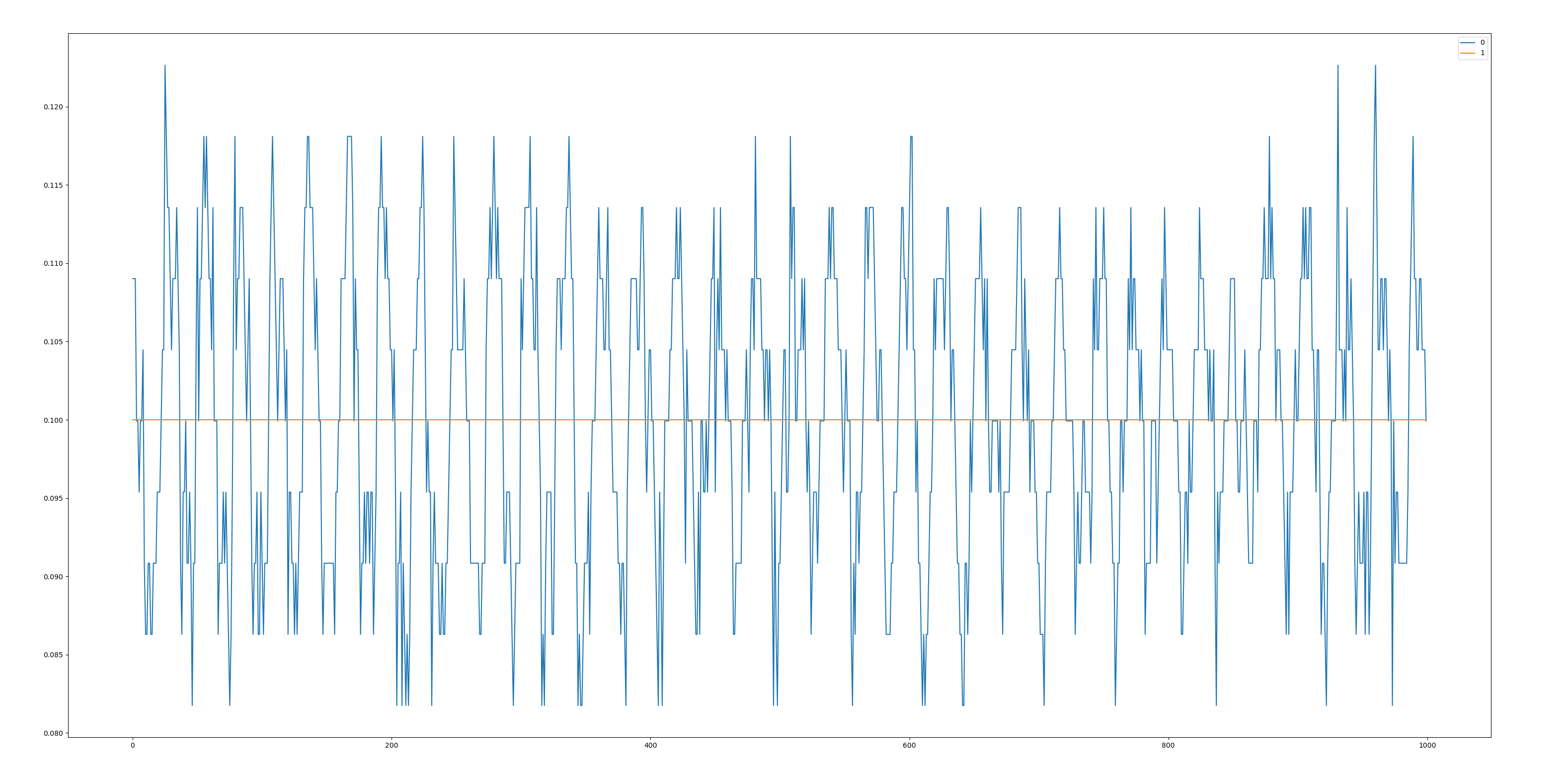
blue is
vel_estimateorange is
vel_setpoint
I performed the anticogging calibration but I don’t think that made any difference.
Are there any encoder parameters I can change to improve this low speed performance?