Hello
I tried to follow the procedure see the picture attached but I can not run the M0 engine when it is connected to my Arduino Mega 2560 + Ramps 1.4 I recovered the dir and the wire step in gpio 2 and 1
do you have an idea I do not understand why it does not work so with the Arduino test procedure it works fine
thank you
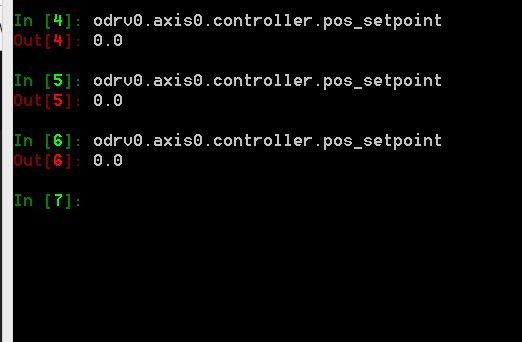
Can you check the error codes? Can you read the odrv0.axis0.controller.pos_setpoint variable to see if it changing when you send step pulses?
no i have 0.0 like picture
And odriv0.axis0.error gives 0 too?
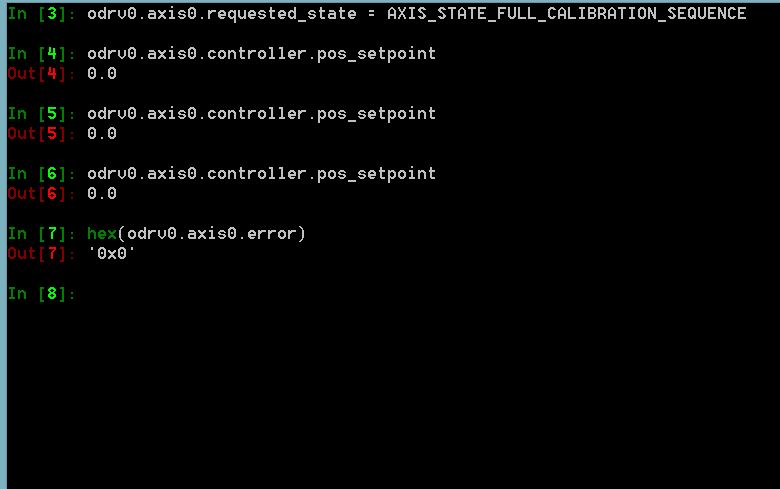
can you show us what you get when you do odrv0
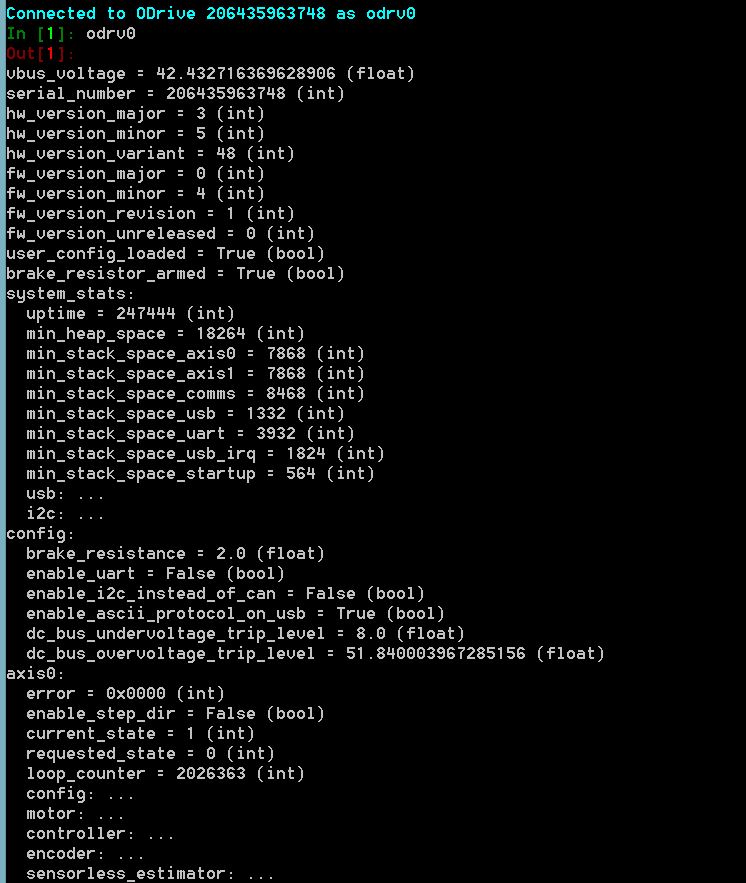
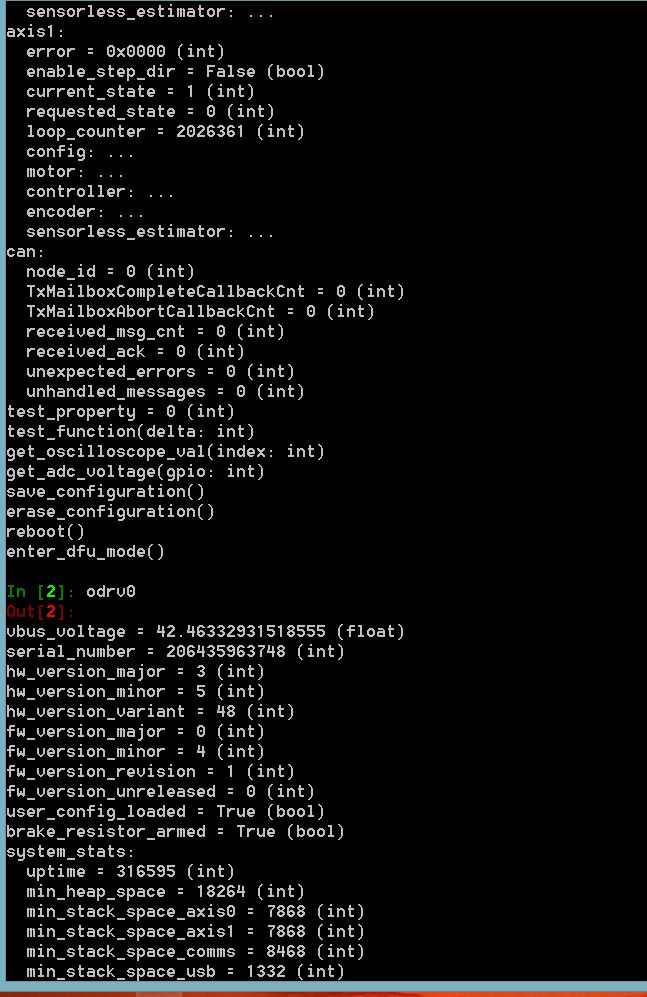

You can see config.enable_step_dir = False for both axes in odrv0. You may want to try updating your firmware from 0.4.1.
Yes I tried to put it back on “True” but he did not take it into account
I will look for the update and redo the test
thank you very much for your help
hello can you look at the photos please I do not understand why The odrive does not take into account the transition to True?
Hi Wetmelon,do you have another idea I’m stuck
Thank you

Hello
I’m doing the procedure to make a recording and modify the Odrive module but apparently it does not record it
Can anyone tell me why I had to do
a mistake thanks for your help
Reconnected to ODrive 206435963748 as odrv0
In [14]: odrv0.config.enable_uart = False
...:
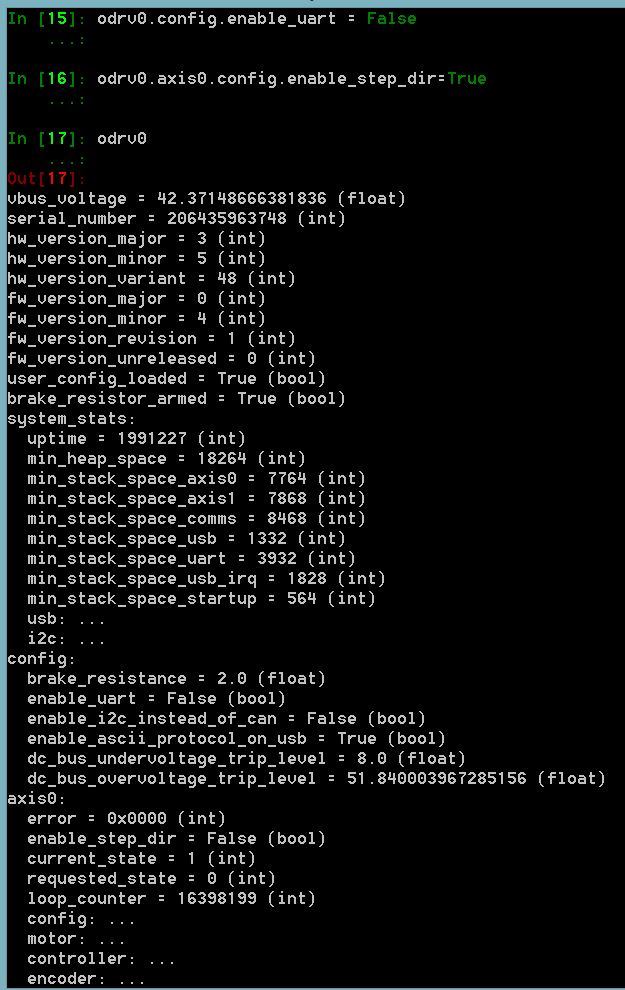
In [15]: odrv0.axis0.config.enable_step_dir=True
...:
In [16]: odrv0.axis1.config.enable_step_dir=True
...:
In [17]: odrv0.save_configuration()
...:
In [18]: odrv0.reboot()
...:
---------------------------------------------------------------------------
USBError Traceback (most recent call last)
C:\ProgramData\Anaconda3\lib\site-packages\fibre\usbbulk_transport.py in process
_packet(self, usbBuffer)
96 try:
---> 97 ret = self.epw.write(usbBuffer, 0)
98 if self._was_damaged:
C:\ProgramData\Anaconda3\lib\site-packages\usb\core.py in write(self, data, time
out)
386 """
--> 387 return self.device.write(self, data, timeout)
388
C:\ProgramData\Anaconda3\lib\site-packages\usb\core.py in write(self, endpoint,
data, timeout)
947 _interop.as_array(data),
--> 948 self.__get_timeout(timeout)
949 )
C:\ProgramData\Anaconda3\lib\site-packages\usb\backend\libusb0.py in bulk_write(
self, dev_handle, ep, intf, data, timeout)
532 intf,
--> 533 data, timeout)
534
C:\ProgramData\Anaconda3\lib\site-packages\usb\backend\libusb0.py in __write(sel
f, fn, dev_handle, ep, intf, data, timeout)
615 length,
--> 616 timeout
617 )))
C:\ProgramData\Anaconda3\lib\site-packages\usb\backend\libusb0.py in _check(ret)
430 return ret
--> 431 raise USBError(errmsg, ret)
432
USBError: [Errno None] b'libusb0-dll:err [submit_async] submitting request faile
d, win error: Le p\xe9riph\xe9rique ne reconna\xeet pas la commande.\r\n'
During handling of the above exception, another exception occurred:
TimeoutError Traceback (most recent call last)
C:\ProgramData\Anaconda3\lib\site-packages\fibre\shell.py in <module>()
----> 1 odrv0.reboot()
C:\ProgramData\Anaconda3\lib\site-packages\fibre\remote_object.py in __call__(se
lf, *args)
160 for i in range(len(args)):
161 self._inputs[i].set_value(args[i])
--> 162 self._parent.__channel__.remote_endpoint_operation(self._trigger
_id, None, True, 0)
163 if len(self._outputs) > 0:
164 return self._outputs[0].get_value()
C:\ProgramData\Anaconda3\lib\site-packages\fibre\protocol.py in remote_endpoint_
operation(self, endpoint_id, input, expect_ack, output_length)
294 self._my_lock.acquire()
295 try:
--> 296 self._output.process_packet(packet)
297 except ChannelDamagedException:
298 attempt += 1
C:\ProgramData\Anaconda3\lib\site-packages\fibre\usbbulk_transport.py in process
_packet(self, usbBuffer)
104 raise fibre.protocol.ChannelBrokenException()
105 elif ex.errno is None or ex.errno == 60 or ex.errno == 110: # time
out
--> 106 raise TimeoutError()
107 else:
108 self._logger.debug("error in usbbulk_transport.py, process_packe
t")
TimeoutError:
Reconnected to ODrive 206435963748 as odrv0
In [19]: odrv0
...:
Out[19]:
vbus_voltage = 42.41740798950195 (float)
serial_number = 206435963748 (int)
hw_version_major = 3 (int)
hw_version_minor = 5 (int)
hw_version_variant = 48 (int)
fw_version_major = 0 (int)
fw_version_minor = 4 (int)
fw_version_revision = 1 (int)
fw_version_unreleased = 0 (int)
user_config_loaded = True (bool)
brake_resistor_armed = True (bool)
system_stats:
uptime = 106048 (int)
min_heap_space = 18264 (int)
min_stack_space_axis0 = 7868 (int)
min_stack_space_axis1 = 7868 (int)
min_stack_space_comms = 8468 (int)
min_stack_space_usb = 1332 (int)
min_stack_space_uart = 3932 (int)
min_stack_space_usb_irq = 1828 (int)
min_stack_space_startup = 564 (int)
usb: ...
i2c: ...
config:
brake_resistance = 2.0 (float)
enable_uart = False (bool)
enable_i2c_instead_of_can = False (bool)
enable_ascii_protocol_on_usb = True (bool)
dc_bus_undervoltage_trip_level = 8.0 (float)
dc_bus_overvoltage_trip_level = 51.840003967285156 (float)
axis0:
error = 0x0000 (int)
enable_step_dir = False (bool)
current_state = 1 (int)
requested_state = 0 (int)
loop_counter = 861052 (int)
config: ...
motor: ...
controller: ...
encoder: ...
sensorless_estimator: ...
axis1:
error = 0x0000 (int)
enable_step_dir = False (bool)
current_state = 1 (int)
requested_state = 0 (int)
loop_counter = 861059 (int)
config: ...
motor: ...
controller: ...
encoder: ...
sensorless_estimator: ...
can:
node_id = 0 (int)
TxMailboxCompleteCallbackCnt = 0 (int)
TxMailboxAbortCallbackCnt = 0 (int)
received_msg_cnt = 0 (int)
received_ack = 0 (int)
unexpected_errors = 0 (int)
unhandled_messages = 0 (int)
test_property = 0 (int)
test_function(delta: int)
get_oscilloscope_val(index: int)
get_adc_voltage(gpio: int)
save_configuration()
erase_configuration()
reboot()
enter_dfu_mode()
In [20]:```This looks correct to me. There are two enable_step_dir variables. They are:
-
axis.config.enable_step_dir- this means you want to be using step/dir when the motor is on. -
axis.enable_step_dir- This means step/dir is listening right now. This is only true when the motor is in closed loop control mode. We should probably rename this. I will look at renaming this tostep_dir_activefor the next release.