Hi!
We are working on a robot with oDrive controller and 2 hoverboard motors. In order to configure the motors, we’ve been following the steps explained on the tutorial (https://docs.odriverobotics.com/hoverboard) and everything is working perfectly. The problem comes when creating the next script for controlling both motors:
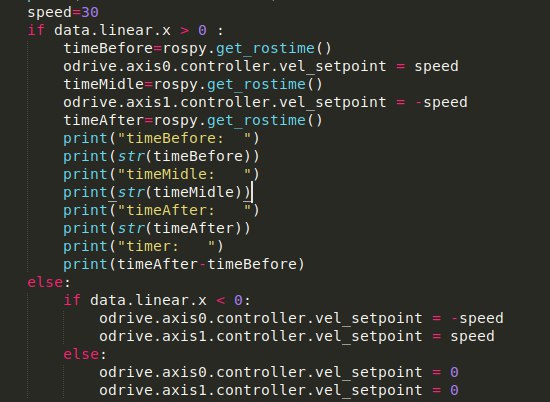
We are having trouble with the time that goes from the moment the velocity for one motor is set to the moment it is set for the other motor. It is too high, even if we set them immediately one after the other (times in nanoseconds):
timeBefore: 1571672378333167076
timeMidle: 1571672379033879995
timeAfter: 1571672380123322010
timeAfter-timeBefore: 1790154934
timeBefore: 1571672391617016077
timeMidle: 1571672392223576068
timeAfter: 1571672392571610927
timeAfter-timeBefore: 954594850
timeBefore: 1571672398337743043
timeMidle: 571672398340759992
timeAfter: 1571672398345537900
timeAfter-timeBefore: 7794857
As you can see, there are times that the iteration lasts almost 2s, which is too much time for our project.
Our question is if this is the best way of approaching the control of the two motors or there is a better way.
Thank you so much in advance.
Greetings,
Mario.
