I now want to run the tuning procedure, but i don’t get what i should do, using the GUI. I already don’t know what to do according to that instruction: “Make sure you have a stable system. If it is not, decrease all gains until you have one.” How do i see if i have a stable system? What control mode should i have running? Torque,Velocity,Position? Should i be in ClosedControlLoop?
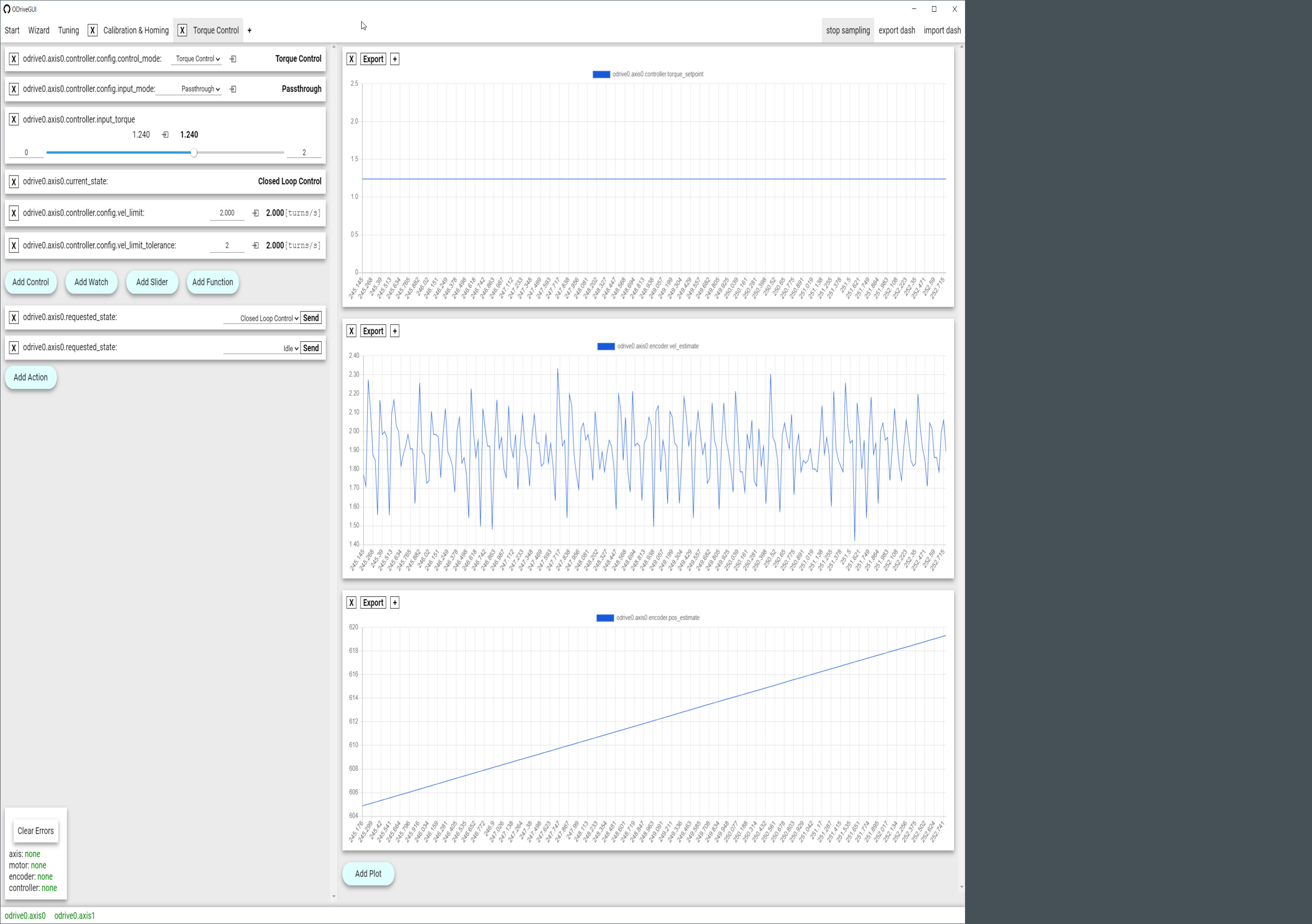
The motor is running with about 2 turns/sec, but the velocity signal looks very bumpy, don’t you think? it jitters at around ±20%… Actually the motor itself is really very noisy, feels like the cogging is very strong.
The velocity limiter in torque mode is enabled by default, but it can be a bit noisy. It doesn’t use the same velocity controller that velocity or position modes use
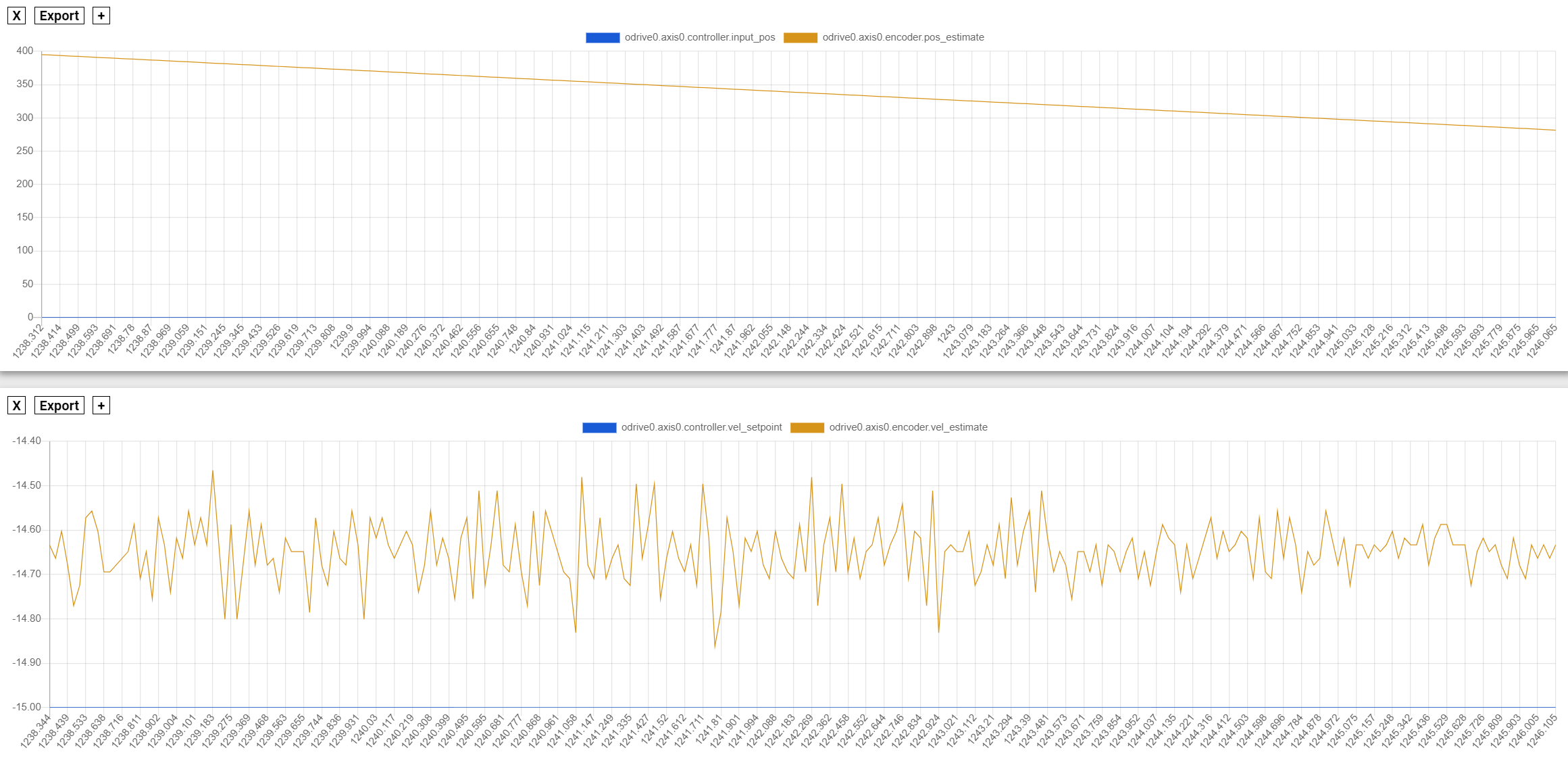
i don’t only have that noisy velocity signal in torque mode, but also in TrapTraj. I haven’t tuned any controller gains yet because i do not know how to proceed (see above)…
also: in TrapTraj mode, i have a constante deviation from the vel_setpoint, how is that explainable? I’d expect to closely match the vel_setpoint in order to exactly match the pos_setpoint?