As I mentioned in another post, I am building a drum-playing robot. Specifically, I’m making a robot that plays the drums that typically accompany a modern marching band: snare drum, tenors (quad-toms), 4-5 bass drums and cymbals. Eventually, I hope to pull the whole thing on a bike trailer.
One of the main things that will differentiate my robot from some of the exisiting drum-playing robots, is that I intend my robot to be LOUD—as loud as the 7-8 human players that it typically takes to play all of the marching drums. I’m starting with a single bass drum, and will add a snare drum next. I hope to have these two drums operational by the end of the summer.
To estimate the required speed for loud playing, I recorded a video of me hitting the drum at full volume, and used a free java app to analyze the motion and measure the speed at impact.
- The stick speed of a full-volume hit is 60 rad/s (573 RPM)
- A quick playing tempo is 16th notes at 120 BPM
- For the whole motion, approach and retract, 120 BPM works out to 0.5s per ¼ note or 0.125s per 1/16 note. That leaves roughly 60ms to accelerate to 60 rad/s, a constant acceleration of 1000 rad/s2
- A super-human playing tempo is full-volume 32nd notes at 120 BPM—2000 rad/s2
- My bass drum mallet has a moment of inertia that I calculate to be 0.0025 kg·m2
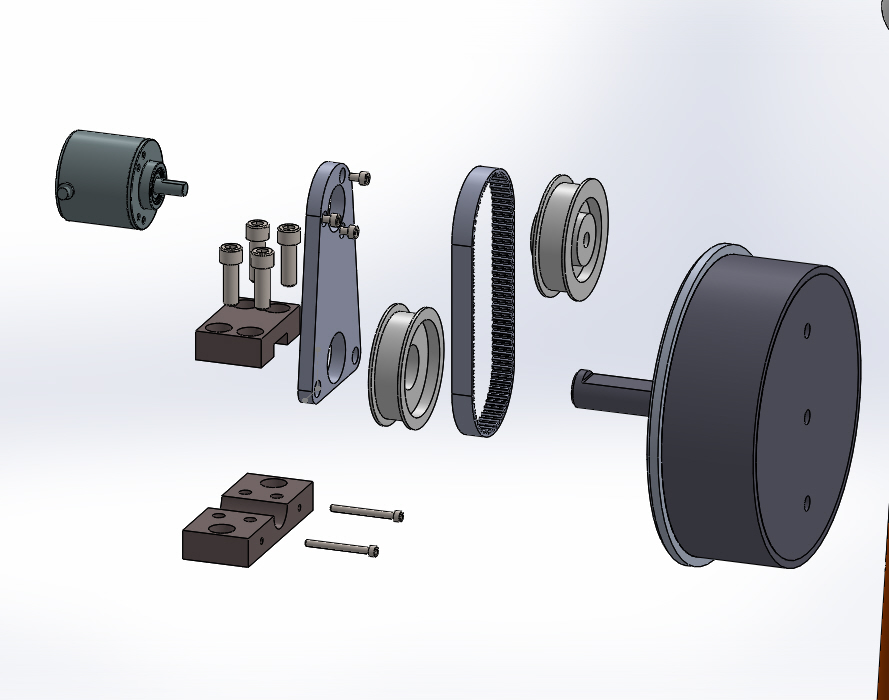
Based on these figures and the data available in the Odrive motor spreadsheet, I’m hoping that hoverboard motors will provide the performance I’m looking for.
Oskar calculated the MOI of the hoverboard motor to be 0.00701 kg·m2.
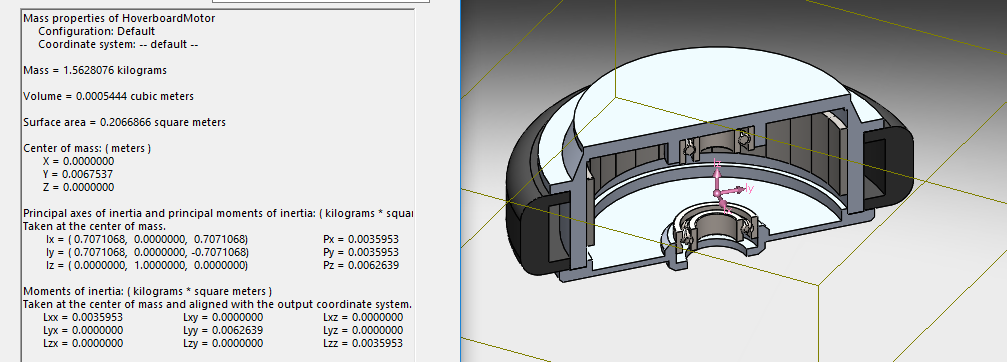
My model of the motor returns a MOI of 0.00626 kg·m2, which is consistent enough for me to rely on my model for subsequent values.
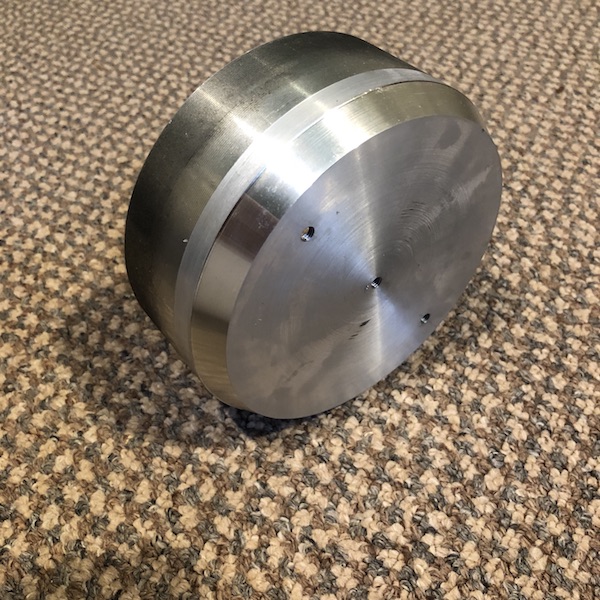
I spent some time in my father-in-law’s machine shop this weekend, and put the motor on a little bit of a diet. I removed the tire, turned off the tire flange, and faced the motor to remove the patterned top.
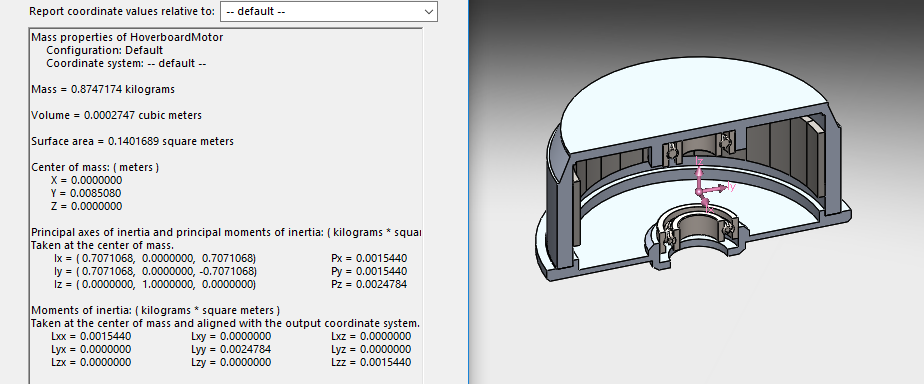
I haven’t had an opportunity to weigh the new motor, but my model calculations puts the hoverboard motor MOI at 0.0025 kg·m2.
- At this point the combined (calculated) MOI of my actuator is Itotal = 0.005 kg·m2
- τmax = (Itotal)( amax) = (0.005 kg·m2)(2000 rad/s2) = 10 N·m
So, it looks like the hoverboard motor, as spec’d, should just barely provide me with the acceleration I need for peak performance. The next step is to test the real-world acceleration to see if it will meet my needs. If not, I can put the motor on an extreme diet, which will reduce it’s MOI by another factor of two: