Will the new firmware allow a combination of hall sensors and encoder? I already have the as5311 installed. But would like to use the hall sensor for position alignment on startup.
I think the firmware will allow it, but the limit will be how many spare pins you have to get both in at once.
Ok. I’ll use only encoder for now, and do the calibration on each startup, and we’ll see what happens in the future about indexing, or maybe a low power mode to count pulses when the vehicle is not in use.
What configuration settings do you recommend for the hoverboard motors? I installed the first motor today, but got DRV fault, so I’ll do the cap modification tomorrow.
So actually the high inductance of these motors and the noise of the current sensors means that there are stability issues with the current controller at the hard-coded bandwidth. You can take a look at the powerwheels branch, but unfortunately you will have to figure out what’s going on. I can’t support it right now, if you can’t get it to work you will have to wait until I have integrated the hoverboard wheel stuff into devel and I have added documentation.
Excellent, we received in Brazil an odroid v3.4 about three months ago and we are trying to make it work with these 6.5 "wheels. Now I see that the question is very complex, do you have any tips or parameters that can help us?
Yes, I get error code 3 now. Will decreasing the resistance by resoldering the motor from star to delta make it work?
In a few weeks I hope to find the time to do a hoverboard wheel configuration recommendation writeup.
1 Like
that would be brilliant!
Fantastic, here we have the wheels BLDC and Odrive 3.4, if there is any test that we can do or collaborate please let us know we will do it quickly and return the result
Hi again,
Could you please explain to me how are you going to get absoulute angle using the magnet encoders.
Thanks =)
@alexisdal, @lince: There is now a preview for the hoverboard motor config writeup here.
@walterinho: I think I will use some sort of home switch. This has to be accurate to within +/- 1/128 turn, because the magnet ring has 64 index pulses per revolution.
thanks. It seems doable. i’ll try and report asap
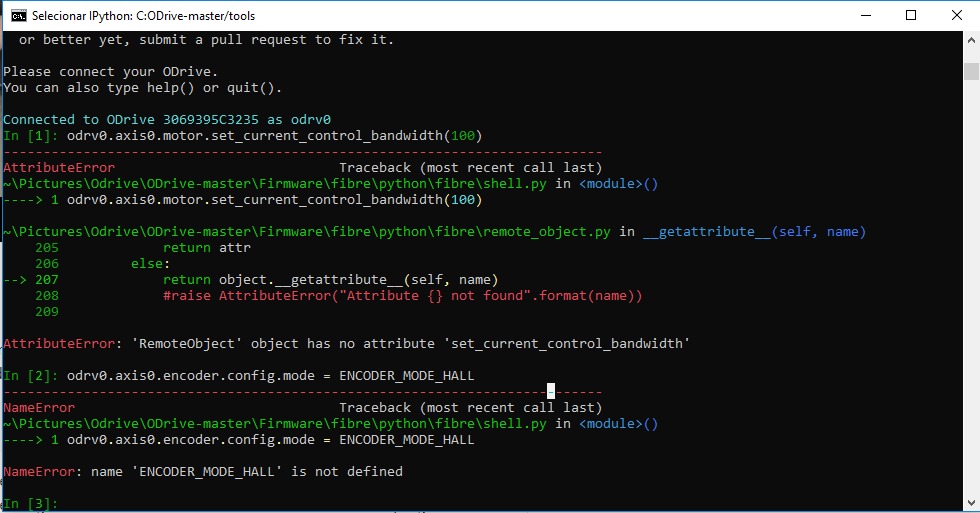
Great, we’re trying to make it work with the preview but it’s not working.
We are using an ODrive 3.4 48V with an hoverboard wheel, hall sensors conected to
A, B, Z,
We are not using an aditional encoder, is that OK?
We have a magnetic encoder already but is a AS5040 and there are only the AS5047p in the list
Hi, It´s possible to have STL file to the starfish pulley? to be 3D printed.
Thks
1 Like
could you provide the pulley stl file thank you
Hi,
I’ve updated the permissions so you can now export what you need from the onshape document.
1 Like
Is it possible to run the hoverboard motor with position control without knowing the kv value? I do not own an oscilloscope to do the drill test. The documentation says that I can set the value to 16 RPM/V, but how will that affect the setup, that the value is a bit off?
Hi madcowswe
I am new to Odrive and trying to configure with Hoverboard 6.5 inc Wheel but I am not getting values in internet
Can you please help me with Odriver and Hoverboard wheel configuration detail I have just install Odrivetool
I will be connection Odrive with Arduino mega to control hoverboard wheels