Hello.
I want to share my project, which I have been running since the beginning of 2018.
The main idea was to create a robotic arm for garbage sorting, but now it seems that the result can be used in other areas.
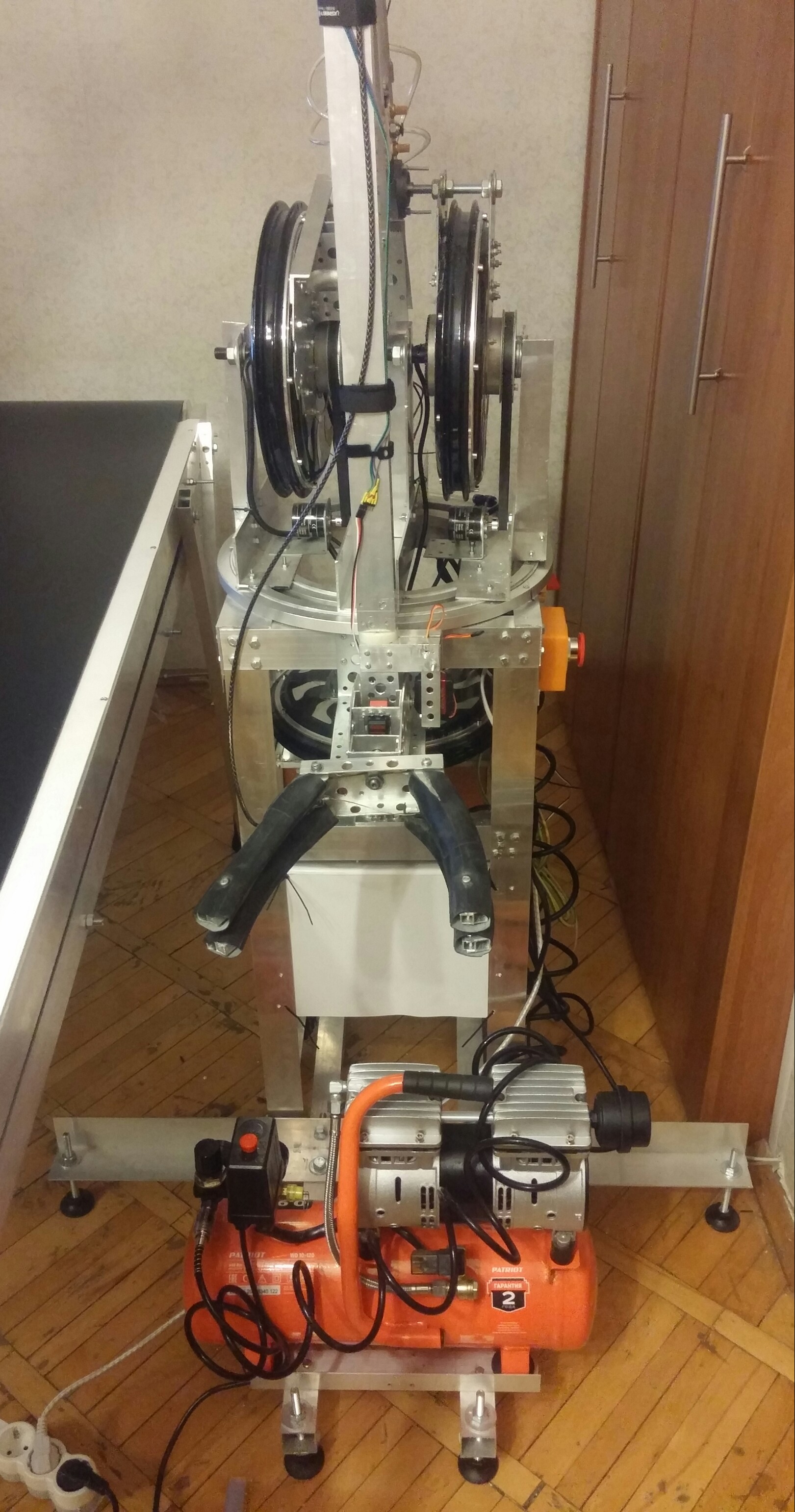
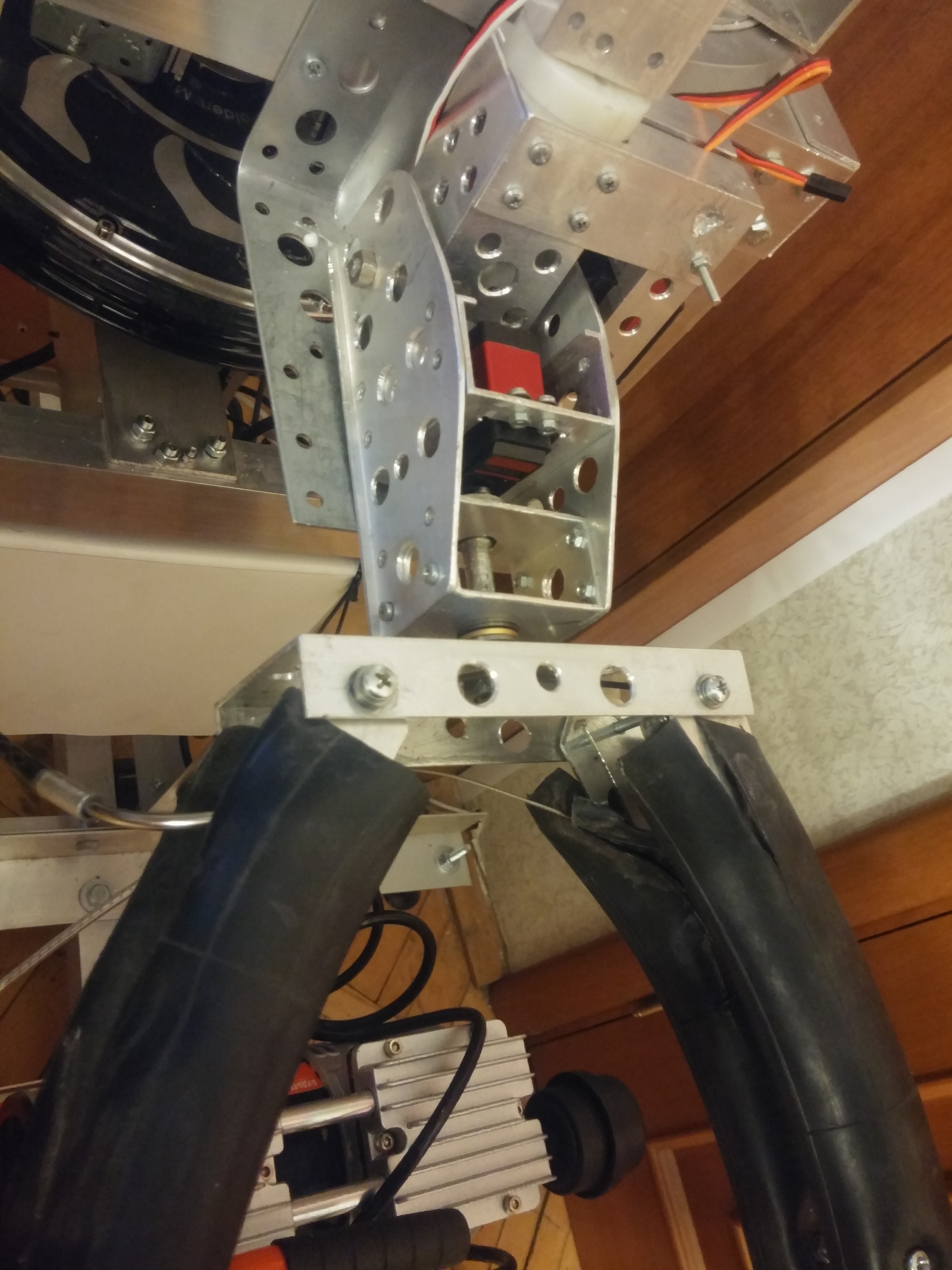
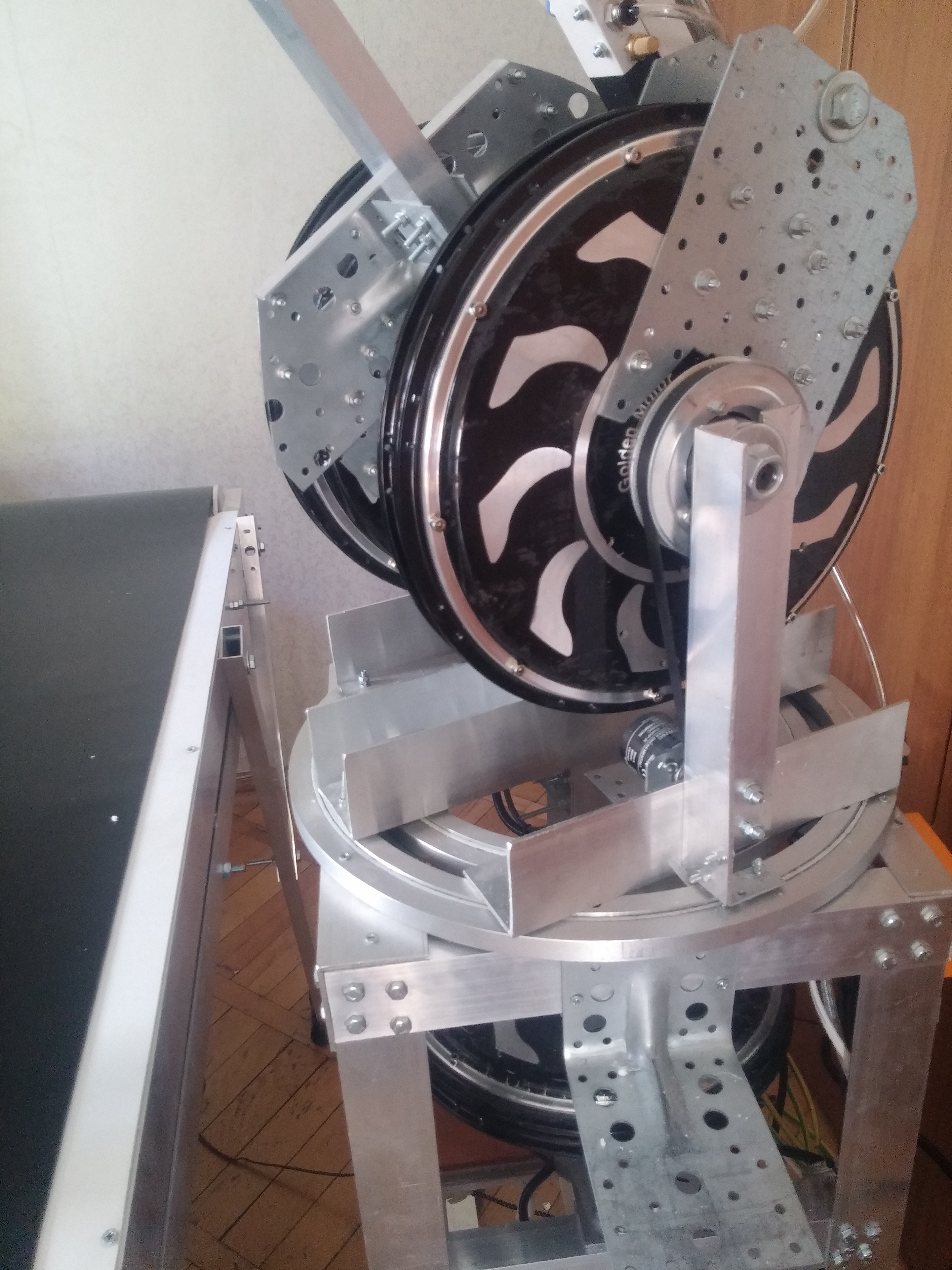
Here is the general view of the robotic arm

The motors for the robotic arm are Magic Pie 2 (48 Volts, 56 magnets, 1500 kw). These motors can output torque up to 70 nm.
Power Source - MeanWell RSP-3000-48
As encoders I used the E6B2CWZ6C OMRON 2500pr with Z-index. Since absolute encoders are not yet supported by ODrive.
The video below shows the movement of the robotic arm from point to point
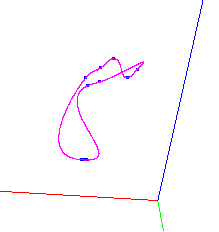
The special feature of the manipulator movement from point to point is the sudden stop, acceleration and change of direction of movement, which leads to shock loads. To solve this problem, I used splines to build my trajectory.
The figure shows the trajectory constructed in three-dimensional space by reference points through which the manipulator should pass.
As a result, the movement will not be from point to point, but on the points of the trajectory, which will provide smoothness
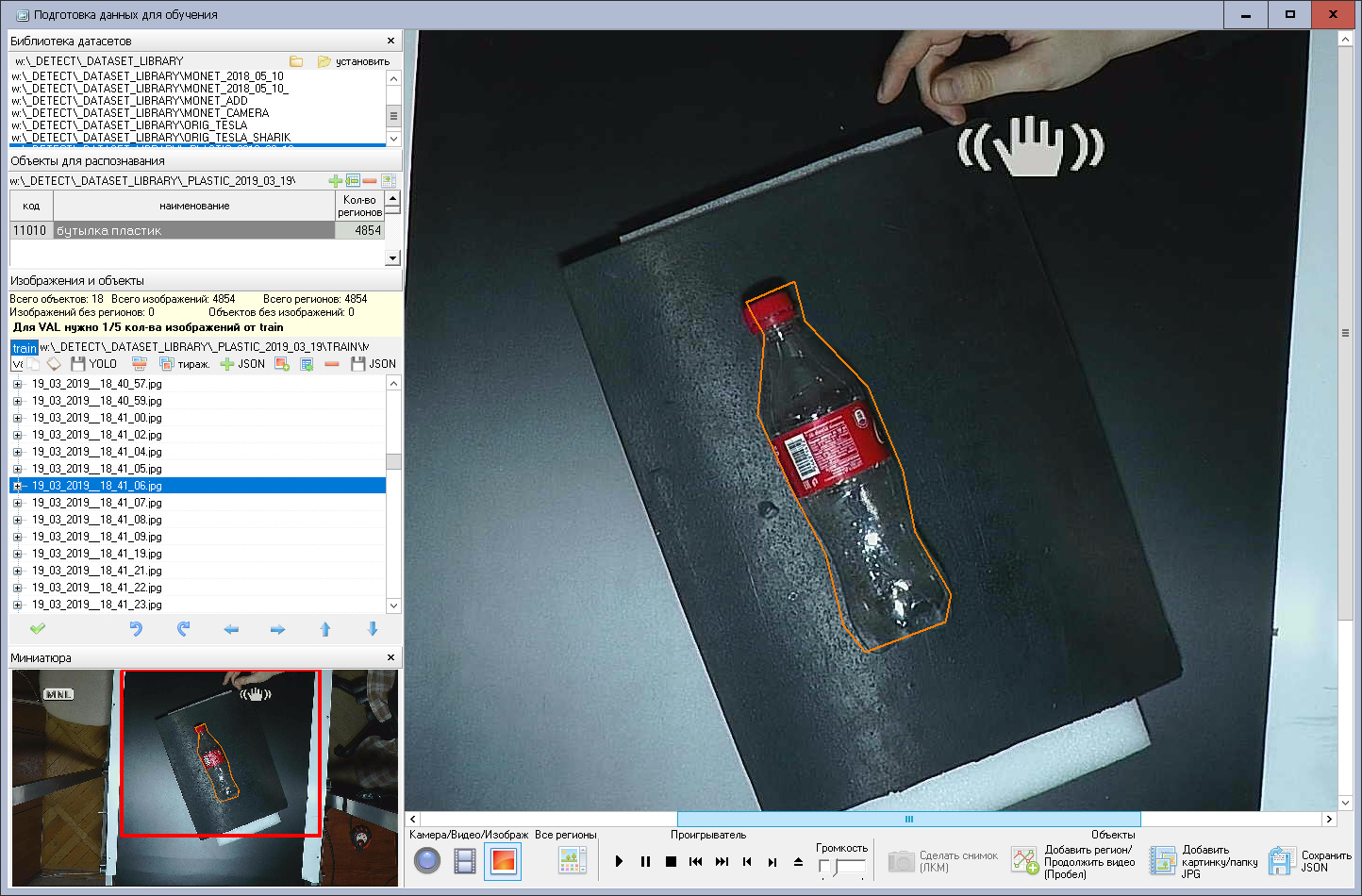
I used YOLO and MASK R-CNNN as my image recognition system
Here is an example of an image preparation program created to train these neural networks
As a result, here is a video showing the work with the conveyor at different speeds (not very good yet, but I plan to make a better video later)
Although ODrive and motors can handle 40A current on the first part of the video arm operates only with 10A current
Here is the work of the program for tracking objects and building the trajectory of the robotiс arm
Next, I plan to optimize the work with the trajectory and use pneumatic suction cups instead of gripping. And to make a better video showing all the possibilities of the manipulator.
For example, thanks to ODrive’s capabilities, you can also record motion by moving the arm with your hand and then play it back
Here’s the video
After that I plan to lighten the motors and the entire design to get higher payload and speed, and to switch to absolute encoders.
If this can be achieved, it will theoretically be possible to create other devices that use these robotic arm in their design
Thank you and excuse my English (deepl.com helped me  )
)