Hello, everyone.
I just want to show you the current state of project development.
We are using Odrive paired with AMT232B-V absolute encoders.
The simulation environment is made with Unity3d.
Tomato recognition runs on a Mask-R CNN.
The trajectory for the grip is built using the gradient descent method.
The end of the grip has soft rubber tentacles to prevent crushing the fruits and vegetables. When air pressure is applied to them, the grip occurs. The video shows 2 tentacles, but there will be up to 4 in total.
The shoulder motors look huge. Even the end effector motors look like 8318s which have about 2Nm.
Is the forearm rotate motor geared?
It looks a bit out of proportion with its gripper, but I guess you are planning to make that stronger.
Kinematics similar to a “Phantom” haptic interface device. Have you tried using it for Haptics?
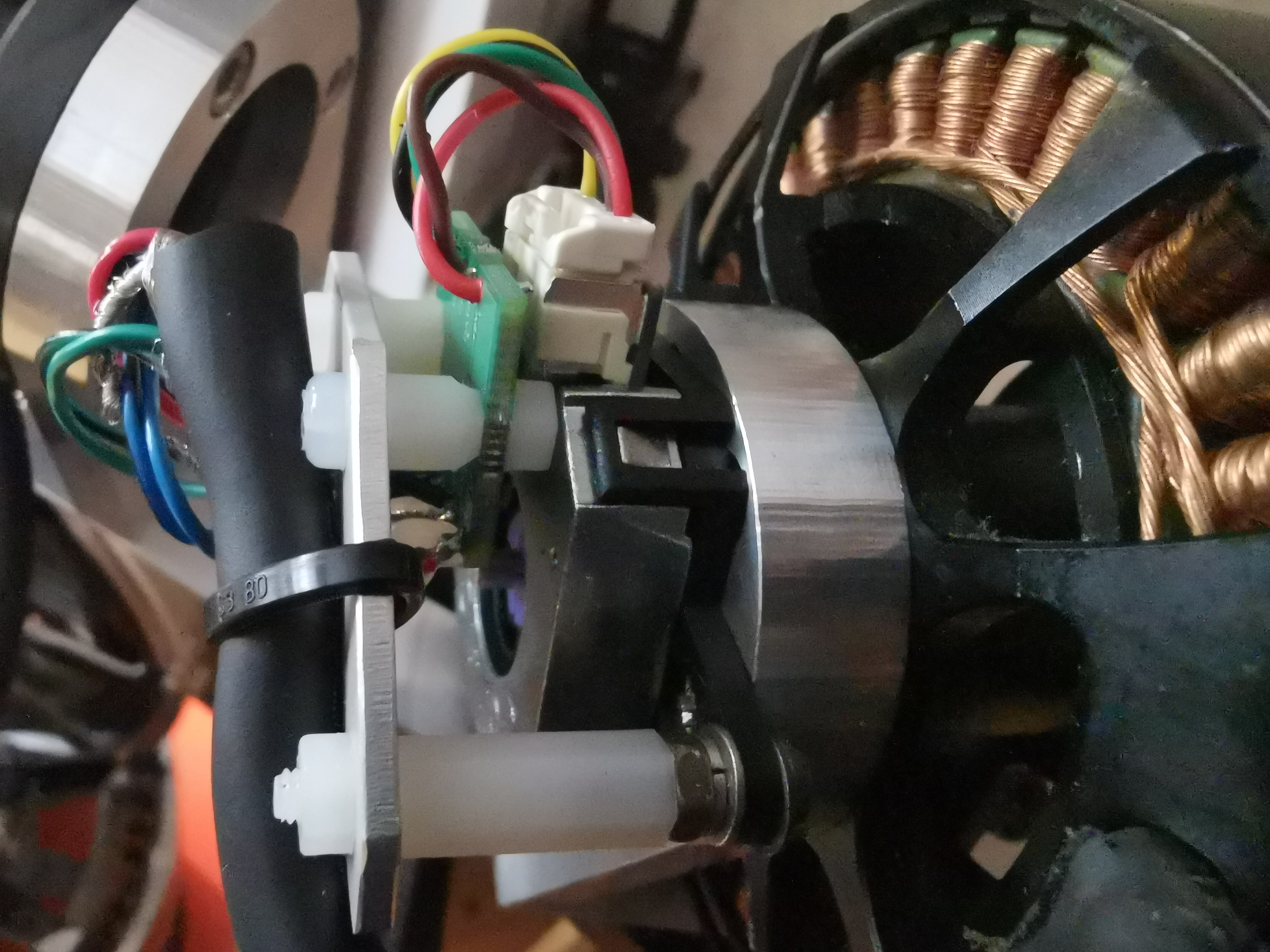
we use modified MagicPie2 motors Magic Pie 2 Front Motor - Golden Motor Canada
These motors have a large hub in the middle in which an encoder can be built in after removing the axis. The lightening made it possible to reduce the weight of each motor by 30%
Is the forearm rotate motor geared?
No, it’s a motor from an electric scooter.
Have you tried using it for Haptics?
No, but it’s a very interesting technology and since we have all direct drive motors, it might be easy to implement.
Are you using the anticogging feature in ODrive?
Not yet, we solved it by adjusting the gain and speed parameters
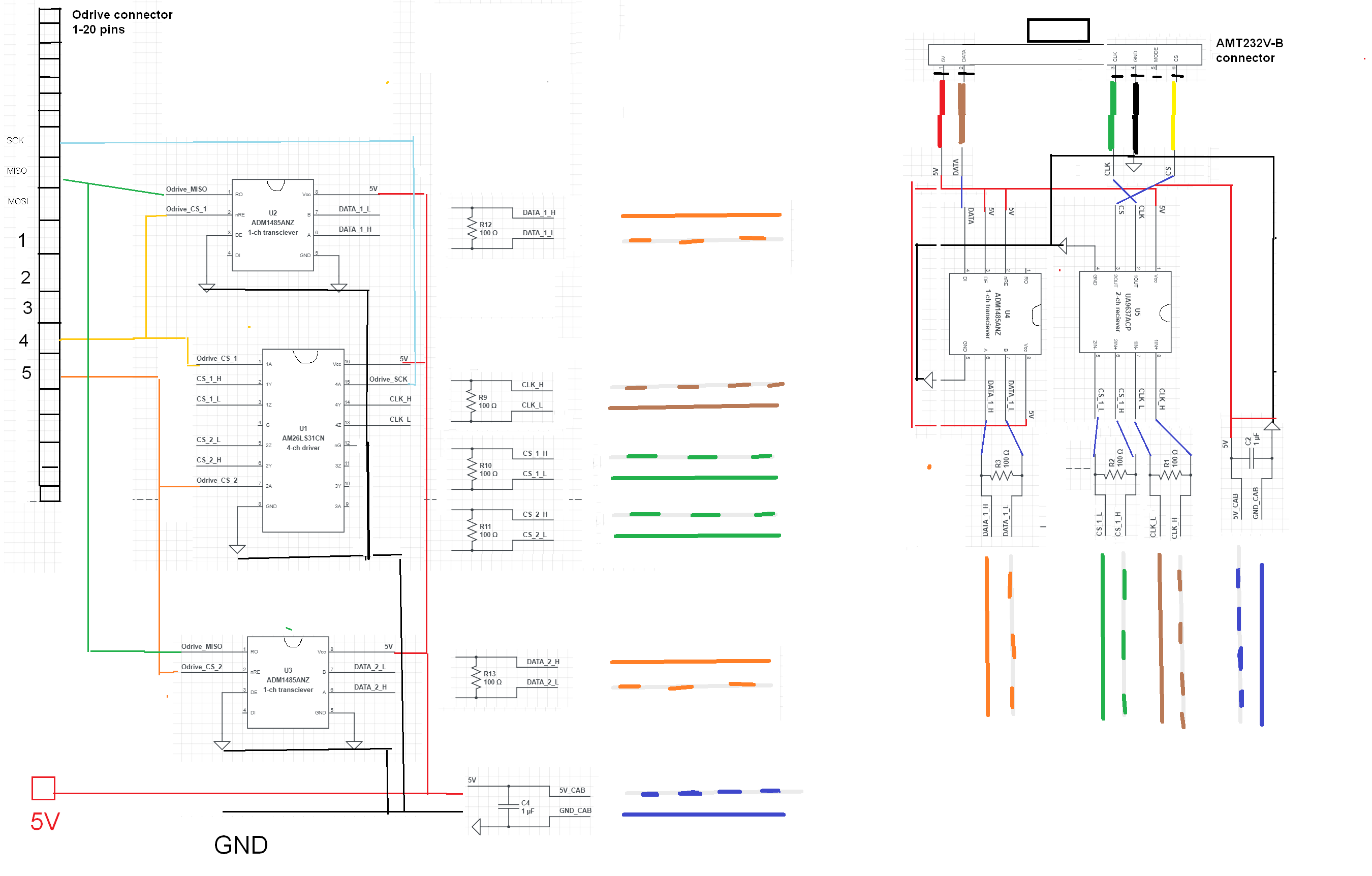
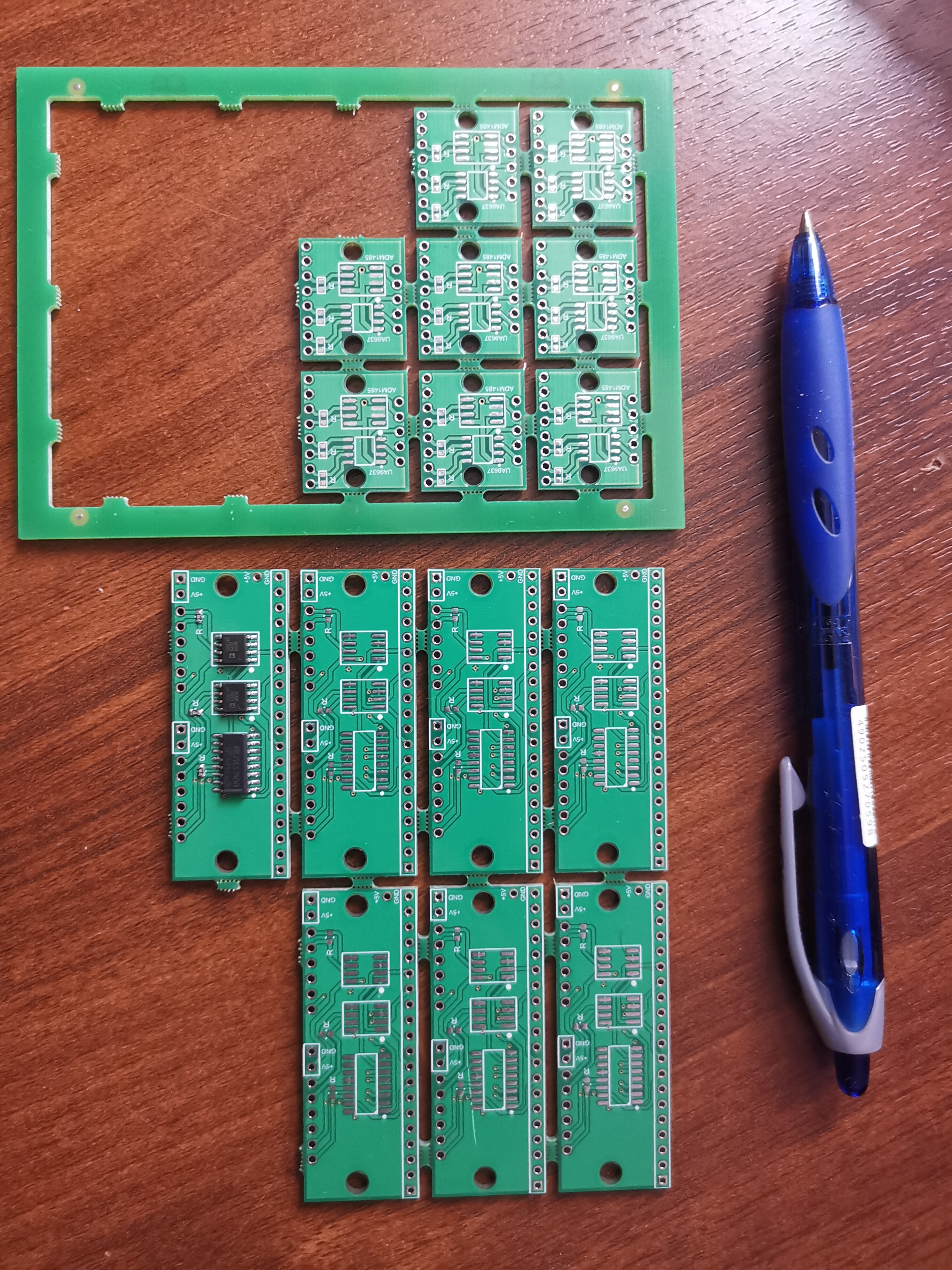
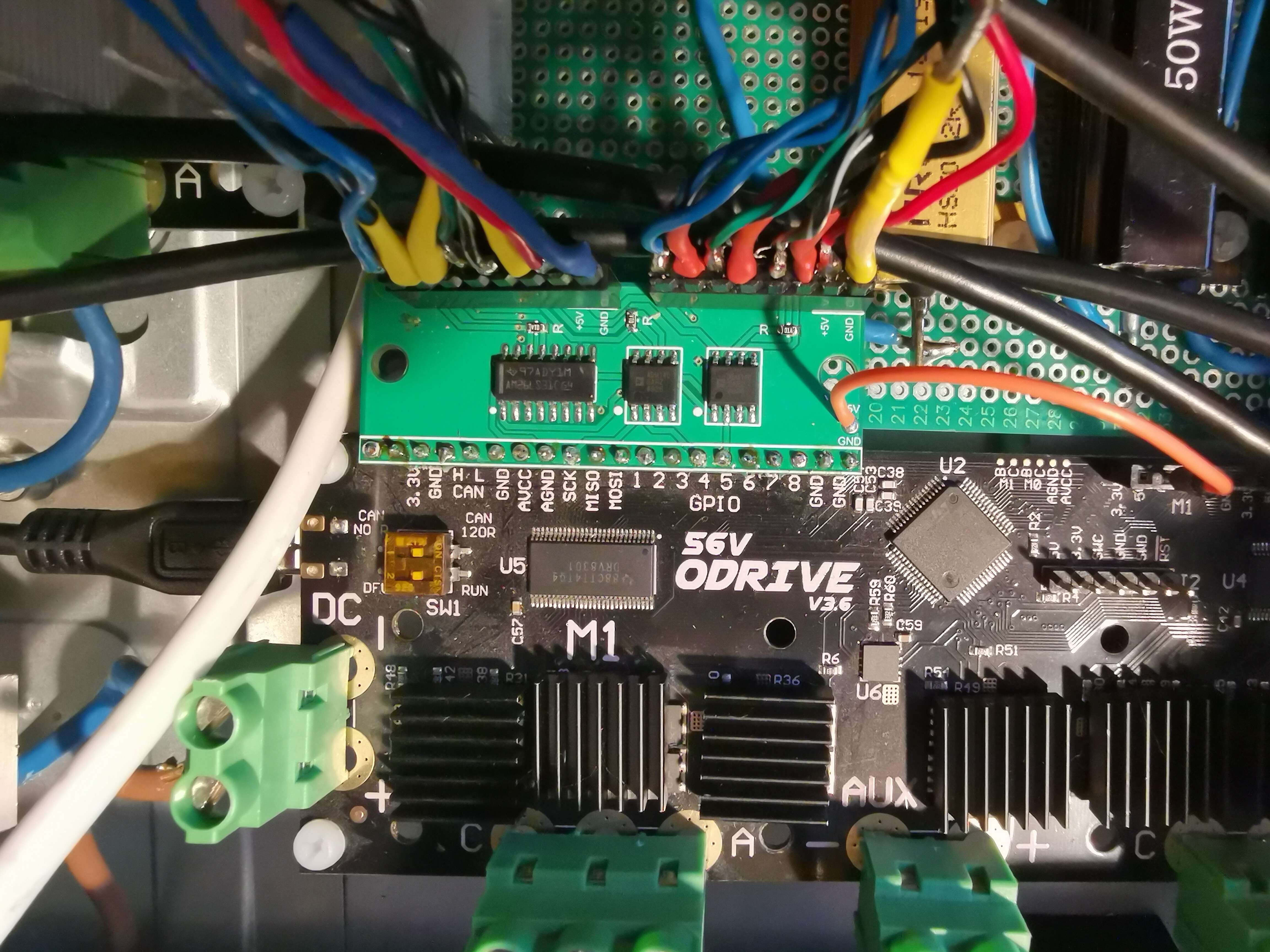
We put an additional transmission interface between Odrive and encoder including tristate buffer.
I will give here its circuit diagram, so that everyone can use it.
Connecting the Odrive to the AMT232B-V with only a tristate buffer does not solve the problem because of the large interference. The proposed scheme reduces the error rate to 0.
You need a twisted pair to connect between the Odrive part and the encoder.
Only I should note that the 100 ohm resistors should be excluded from it, so that there is no overheating of the microcircuits at short line.
Great project! Might want to move the E-stop switch though In the first video the arm looks to actually be guarding it, not allowing a human to even get close without risking their life


 29.10.2020")
")


 What motors are you using?
What motors are you using?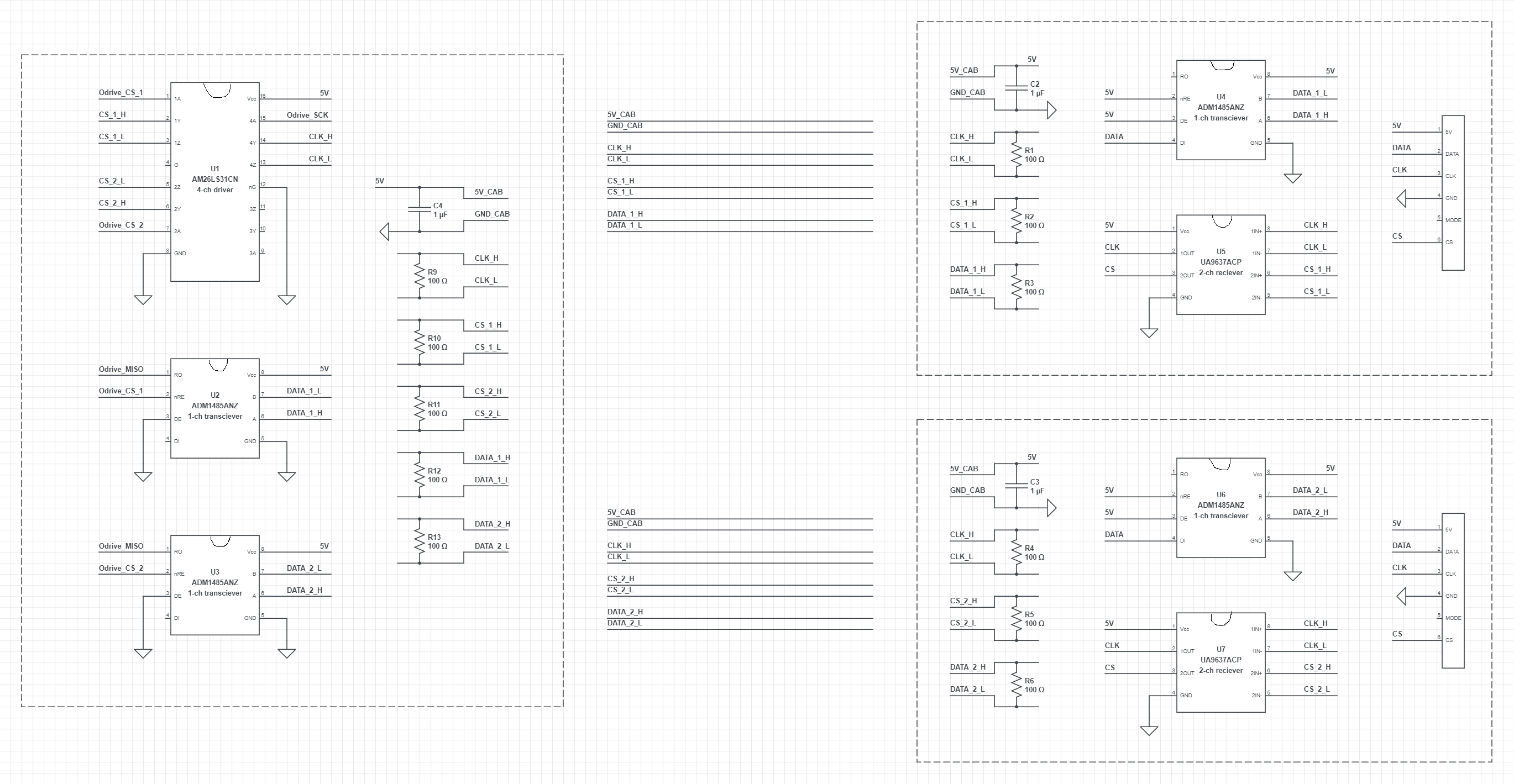

 In the first video the arm looks to actually be guarding it, not allowing a human to even get close without risking their life
In the first video the arm looks to actually be guarding it, not allowing a human to even get close without risking their life 