Hello everyone. I started ODRIVE V3.6-56V a few days ago. I’m using anaconda promt cmd(terminal).
Here are the specifications.
Motor > 48 V 200 W 750 rpm 36slot 42pole AS5047P sensor with 4000 cpr(A,B,I)
ODRIVE V3.6-56V
Firmware version 0.5.5
I have some questions.
1-Electric motor have 42 pole, and the coils are buzzing. I think its about PWM frequency. I want to change the switching frequency. Can i change PWM frequency in terminal ?
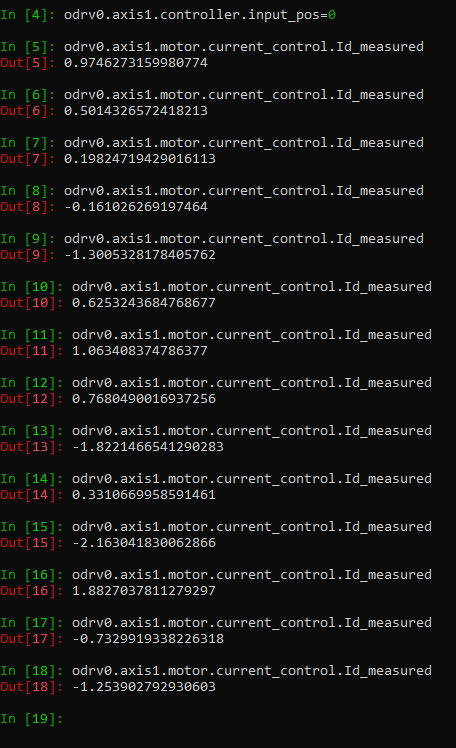
2-I’m checking the measured Id current when the motor spining . Id_measured must be around 0 according to FOC(ofcourse its oscillating around 0). I wonder that how much oscillating is acceptable ?
(Power supply about 0.5 A-48 V and Id_setpoint=0)(I added screenshot)
3-Does Odrive always use FOC on every control types(position, velocity, etc) ?
4-I want to use liveplotter but there are errors. The window looks just a moment. Here the errors.
In [1]: start_liveplotter(lambda:[odrv0.axis1.encoder.pos_estimate, odrv0.axis1.controller.pos_setpoint])
Out[1]: D:\anaconda3\lib\site-packages\odrive\utils.py:310: UserWarning: Starting a Matplotlib GUI outside of the main thread will likely fail.
fig = plt.figure()
<threading.Event at 0x1f7e079ad00>
WARNING: QApplication was not created in the main() thread.
Exception in thread Thread-3:
Traceback (most recent call last):
File "D:\anaconda3\lib\threading.py", line 973, in _bootstrap_inner
In [2]: QObject::killTimer: Timers cannot be stopped from another thread
QObject::~QObject: Timers cannot be stopped from another thread
self.run()
File "D:\anaconda3\lib\threading.py", line 910, in run
self._target(*self._args, **self._kwargs)
File "D:\anaconda3\lib\site-packages\odrive\utils.py", line 318, in plot_data
fig.canvas.start_event_loop(1/plot_rate)
File "D:\anaconda3\lib\site-packages\matplotlib\backends\backend_qt.py", line 408, in start_event_loop
with _maybe_allow_interrupt(event_loop):
File "D:\anaconda3\lib\contextlib.py", line 119, in __enter__
return next(self.gen)
File "D:\anaconda3\lib\site-packages\matplotlib\backends\qt_compat.py", line 226, in _maybe_allow_interrupt
old_wakeup_fd = signal.set_wakeup_fd(wsock.fileno())
ValueError: set_wakeup_fd only works in main thread of the main interpreter
Is there a better way to visualize ?
Thanks!