Hello, I am from Japan.
I am not familiar with English, sorry if you find it annoying.
Last year I had my first contact with Odrive and built a 2DOF motion simulator.
I really like it and odrive.
For my next project I want to reproduce a hydraulic lever for a flight simulator.
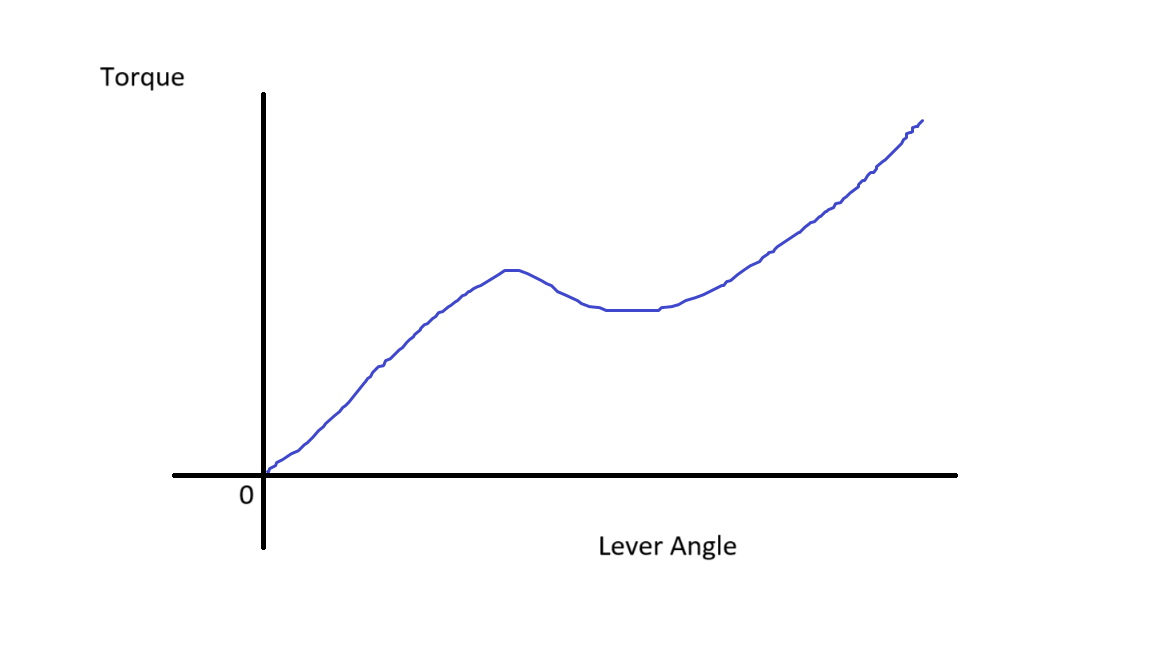
It looks like a torsion spring but not linear in characteristics.
I am trying to make a device that returns non-linear torque to the human hand in response to the angle of twist of a lever connected to a motor.
I want it to return to its initial position when I release my hand. (Like a joystick on a game controller).
I would like some ideas on the appropriate control method in this case.
1.Is the combination of Odrive and BLDC appropriate?
2.Should I just keep getting the angle of the lever and direct the corresponding torque in torque control mode?
Or
3.Is it appropriate to set the vel integral gain to 0 and always indicate position 0 in the position control mode and continue to set the position gain that achieve the spring constant corresponding to the angle of the lever?
Assumptions.
Assume that the torque constant of the motor is accurate.
Assume that the microcontroller can get the angle of the lever fast enough.
The load counterpart is a human feeling, so accuracy and responsiveness may not be so necessary.
I would be happy to receive any ideas you may have.
Thanks.