I am currently using ODrives on several projects. for one, I bought a Fanuc LR Mate 100i which didn’t come with a controller. I rewired the internals to use an ODrive to run everything, and I’ve been working on a full fledged controller and programming system including a wireless controller with interface. It’s going well so far, I will certainly post in more detail when it is finished.
Also, I have two battle bots in progress using ODrives for the drive system. Again, I’ll post more detail when they’re finished. But here’s a prototype slapped together using wood, we measured a speed of over 30mph with this setup.
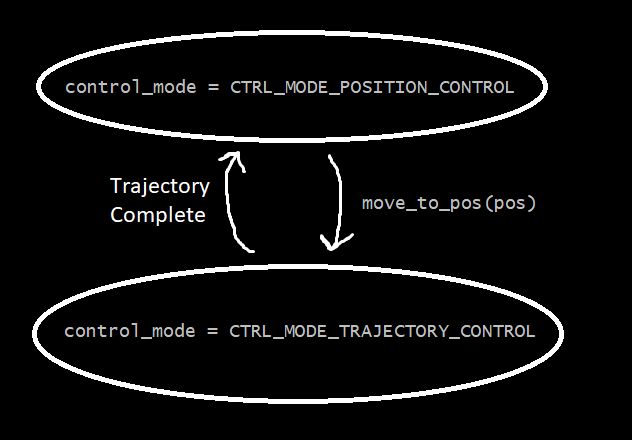
I’ve had a ton of fun with ODrives, and I’m not even close to being finished. I’ve toasted three boards and fixed like two and a half or them. So, here’s I currently have two issues I’m working on getting fixed. The first is not being able to use Trajectory mode. I’ve gotten it to work on this setup before, but currently every time I set control_mode=4, it automatically goes back to control_mode=3.
In [44]: odrv0.axis0
Out[44]:
error = 0x0000 (int)
step_dir_active = False (bool)
current_state = 8 (int)
requested_state = 0 (int)
loop_counter = 14759946 (int)
config:
startup_motor_calibration = False (bool)
startup_encoder_index_search = False (bool)
startup_encoder_offset_calibration = True (bool)
startup_closed_loop_control = False (bool)
startup_sensorless_control = False (bool)
enable_step_dir = False (bool)
counts_per_step = 2.0 (float)
step_gpio_pin = 1 (int)
dir_gpio_pin = 2 (int)
ramp_up_time = 0.4000000059604645 (float)
ramp_up_distance = 12.566370964050293 (float)
spin_up_current = 10.0 (float)
spin_up_acceleration = 400.0 (float)
spin_up_target_vel = 400.0 (float)
get_temp()
motor:
error = 0x0000 (int)
armed_state = 3 (int)
is_calibrated = True (bool)
current_meas_phB = 0.0411112904548645 (float)
current_meas_phC = 0.07308828830718994 (float)
DC_calib_phB = -0.5445712804794312 (float)
DC_calib_phC = -1.3016663789749146 (float)
phase_current_rev_gain = 0.012500000186264515 (float)
current_control: ...
gate_driver: ...
timing_log: ...
config: ...
controller:
error = 0x0000 (int)
pos_setpoint = 709.75 (float)
vel_setpoint = 0.0 (float)
vel_integrator_current = -0.057480763643980026 (float)
current_setpoint = 0.0 (float)
vel_ramp_target = 0.0 (float)
vel_ramp_enable = False (bool)
config: ...
set_pos_setpoint(pos_setpoint: float, vel_feed_forward: float, current_feed_forward: float)
set_vel_setpoint(vel_setpoint: float, current_feed_forward: float)
set_current_setpoint(current_setpoint: float)
move_to_pos(goal_point: float)
start_anticogging_calibration()
encoder:
error = 0x0000 (int)
is_ready = True (bool)
index_found = False (bool)
shadow_count = 709 (int)
count_in_cpr = 709 (int)
interpolation = 0.5 (float)
phase = -0.14398956298828125 (float)
pos_estimate = 709.859375 (float)
pos_cpr = 709.8594970703125 (float)
hall_state = 3 (int)
vel_estimate = 0.0 (float)
config: ...
sensorless_estimator:
error = 0x0000 (int)
phase = 0.14302998781204224 (float)
pll_pos = 0.05569663643836975 (float)
vel_estimate = -2.947011947631836 (float)
config: ...
trap_traj:
config: ...
In [45]: odrv0.axis0.controller
Out[45]:
error = 0x0000 (int)
pos_setpoint = 709.75 (float)
vel_setpoint = 0.0 (float)
vel_integrator_current = 0.07490172237157822 (float)
current_setpoint = 0.0 (float)
vel_ramp_target = 0.0 (float)
vel_ramp_enable = False (bool)
config:
control_mode = 3 (int)
pos_gain = 50.0 (float)
vel_gain = 0.00039999998989515007 (float)
vel_integrator_gain = 0.0005000000237487257 (float)
vel_limit = 23000.0 (float)
vel_limit_tolerance = 1.2000000476837158 (float)
vel_ramp_rate = 10000.0 (float)
setpoints_in_cpr = False (bool)
set_pos_setpoint(pos_setpoint: float, vel_feed_forward: float, current_feed_forward: float)
set_vel_setpoint(vel_setpoint: float, current_feed_forward: float)
set_current_setpoint(current_setpoint: float)
move_to_pos(goal_point: float)
start_anticogging_calibration()
In [46]: odrv0.axis0.trap_traj
Out[46]:
config:
vel_limit = 20000.0 (float)
accel_limit = 5000.0 (float)
decel_limit = 5000.0 (float)
A_per_css = 0.0 (float)
It’s weird because as i said, Traptraj was working fine with this exact setup not too long ago. Anyway, the other issue is with loosing encoder pulses (I think). This happens on the prototype battle bot linked above, so it goes through a lot of hits and shock. as I drive around and hit into stuff at high speed, a motor will go slower: even when the vel_stpoints are set to exactly the same value. I programmed my transmitter to do a full calibration (requested_state=3) when I push a button, this fixes the issue, but it always comes back after maybe 7 minutes of playing. You’re cool if you made it this far into my pitiful paragraphs  .
.