Hi,
I am doing a project that needs to control the velocity and position of the hobby motor. I bought
- hobby motor RS 2205 2300Kv https://www.banggood.com/Emax-RS2205-2300-2205-2300KV-Racing-Edition-CWCCW-Brushless-Motor-for-RC-Drone-FPV-Racing-p-1028793.html?ID=49005&cur_warehouse=CN
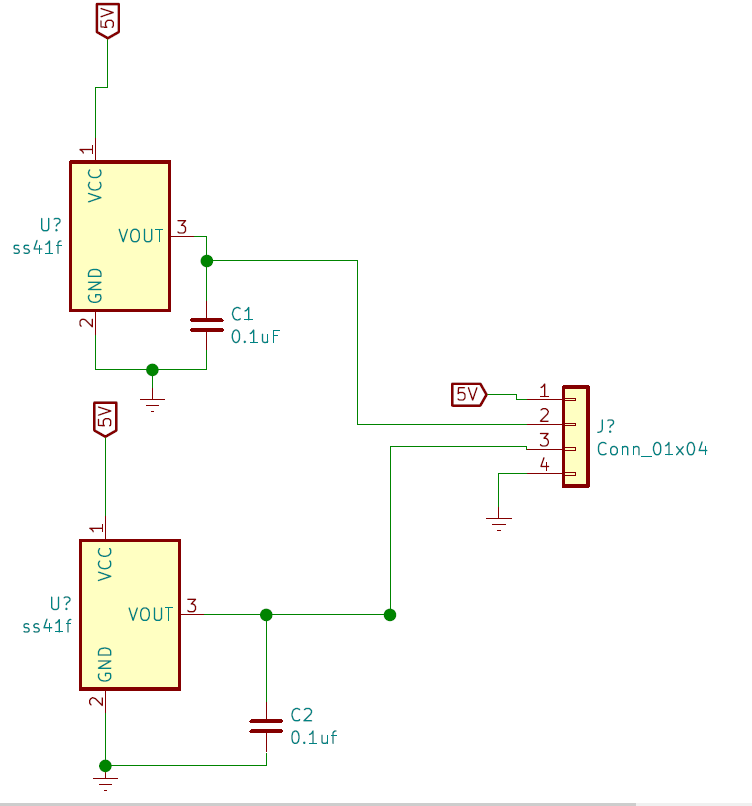
- and i make hall sensor board including 2 sensors (SS41F) https://datasheetspdf.com/pdf-file/932885/HONEYWELL/SS41F/1
The schematic of board here:
odrvie — hall sensor board
5v — 5v
GND — GND
A — Vout1
B — Vout2
I am new to Odrive so i follow the instruction on Odrive document - Getting started and Hoverboard Guide.
when i reach to the
odrv0.axis1.requested_state = AXIS_STATE_ENCODER_OFFSET_CALIBRATION
i got message that:
error = 0x0010 (int)
is_ready = False (bool)
index_found = False (bool)
shadow_count = 0 (int)
count_in_cpr = 0 (int)
interpolation = 0.0 (float)
phase = 0.0 (float)
pos_estimate = 0.0 (float)
pos_cpr = 0.0 (float)
hall_state = 7 (int)
vel_estimate = 0.0 (float)
calib_scan_response = 0.0 (float)
config:
mode = 1 (int)
use_index = False (bool)
find_idx_on_lockin_only = False (bool)
pre_calibrated = False (bool)
zero_count_on_find_idx = True (bool)
cpr = 28 (int)
offset = 0 (int)
offset_float = 0.0 (float)
enable_phase_interpolation = True (bool)
bandwidth = 100.0 (float)
calib_range = 0.019999999552965164 (float)
calib_scan_distance = 50.26548385620117 (float)
calib_scan_omega = 12.566370964050293 (float)
idx_search_unidirectional = False (bool)
ignore_illegal_hall_state = False (bool)
set_linear_count(count: int)
Can anyone help me. Did i do anything wrong or i need to change some thing
Thank you so much
