The original diagram, with the potentiometer, would definitely cause a ground loop and possible damage. I’d strongly recommend using the PT01A or something similar, as then you could wire the PWM output to the ODrive’s isolated IO, which will prevent a ground loop.
Ich möchte mein Projekt um 2 weitere Motore erweitern.
Die sind aber nicht auf der gleichen Achse, haben aber fast die gleiche Drehzahl mit en wenig Schlupf. wenn ich die Motore im Drehmoment Modus betreibe ist das Drehmoment nur noch halb so hoch. welche Einstellung sollte ich verändern?
Ja das hat funktioniert. aber das Drehmoment ist dann abhängig von vel_lim. ich suche eine Einstellung bei dem das Drehmoment unabhängig von der Drehzahl maximal bleibt und die Drehzahl der Motoren einen kleinen Schlupf zulässt.
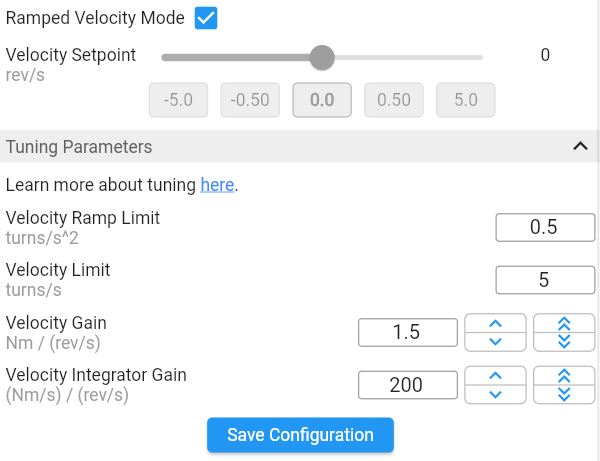
You can increase vel_lim or further tune vel_gain. Note that the maximum stable vel_gain for velocity limiting in torque control mode will be the same maximum stable vel_gain as in normal closed-loop velocity control mode. So you can tune in velocity control then validate in torque control mode. If vel_gain is too high, there may be oscillations while approaching vel_lim.
Alternatively you can just disable velocity limiting in torque mode: odrv0.axis0.controller.enable_torque_mode_vel_limit = False
Habe ich schon probiert
Connected to ODrive S1 002190761B34 (firmware v0.6.11) as odrv0
In [1]: odrv0.axis0.controller.enable_torque_mode_vel_limit = False
File ~\AppData\Local\Programs\Python\Python314\Lib\site-packages\odrive\sync_tree.py:28, in SyncObject.setattr(self, key, value)
26 exists = (key in self.class.dict) or (key in self.dict)
27 if not exists:
—> 28 raise AttributeError(f"Attribute {key} not found.")
29 object.setattr(self, key, value)
AttributeError: Attribute enable_torque_mode_vel_limit not found.
Yes, you can set the torque limits while in velocity mode. However, velocity limited torque mode and torque limited velocity mode are very similar in performance. I would strongly recommend tuning the vel_gain. You can follow this guide: Tuning the Controller — ODrive Documentation 0.6.11 documentation
Ich habe bei Tuning the Controller verschiedene Varianten ohne erfolg Probiert. Ich möchte eine Steuerung wie bei einem allrad Auto bei dem alle räder be jeder Geschwindigkeit das maximale Drehmoment abgeben auch bei kurvenfahrt. die Geschwindigkeit soll aber nach oben begrenzt sein.
You’re just using hall sensors, right? That might be an issue, those are so low resolution that you can’t tune the vel_gain very well, which affects how well torque mode will work with velocity limiting. Are you able to add an external encoder?
MKS FocEncoder
„001
M-O-X-X-02060
Probiert.
Die Ergebnisse sind ähnlich wie beim Drehzahlmodus.
Ich möchte gern eine Toleranz in der Geschwindigkeit der verschiedenen Motore.