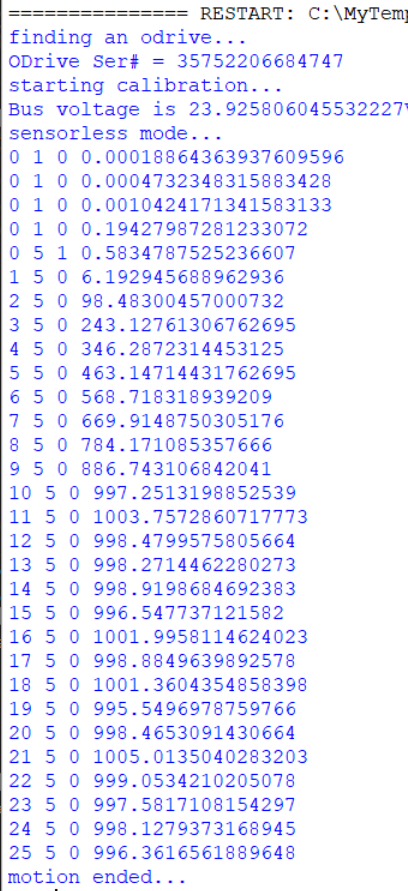
Hi, at the moment I try to get the D5065 motor to run sensorless at higher speed and with no load via python code. The code works fine til 850rpm, above the motor spin up for some seconds and then suddenly stops. To change the acceleration value do not really changes the effect.
What must be changed to reach higher speed limits in sensorless mode? The motor should work til ~5000rpm.
-
Supply 24V / 3A
-
HW V3.6 56V & firmware version 0.5.1
-
my py code (core part without calibration part) →
my_drive.axis0.sensorless_estimator.config.pm_flux_linkage = 5.51328895422 / (7 * 270)
my_drive.axis0.controller.config.vel_gain = 0.01
my_drive.axis0.controller.config.vel_integrator_gain = 0.05
my_drive.axis0.controller.config.control_mode = CONTROL_MODE_VELOCITY_CONTROLSPEED = 850 # rpm
RAMPTIME = 8 # sec
radvel = (SPEED / 60) * 6.28 # rad/s mech
radvel = radvel * 7 # rad/s elaccel = radvel / RAMPTIME
my_drive.axis0.config.sensorless_ramp.accel = accel # rad/s^2 el
my_drive.axis0.config.sensorless_ramp.vel = radvel # rad/s elvelocity = my_drive.axis0.config.sensorless_ramp.vel / (6.28*7) # turns/s me
my_drive.axis0.controller.input_vel = velocityprint("Velocity el [rad/s] = " + str(radvel))
print("Velocity me [turns/s] = " + str(velocity))
print("Acceleration me [rad/s^2] = " + str(accel))my_drive.axis0.controller.config.vel_limit = 1.2 * velocity
my_drive.axis0.config.sensorless_ramp.current = 10
my_drive.axis0.motor.config.current_lim = 2.0 * my_drive.axis0.config.sensorless_ramp.current
my_drive.axis0.motor.config.direction = 1my_drive.axis0.requested_state = AXIS_STATE_SENSORLESS_CONTROL
thx for help Hannes