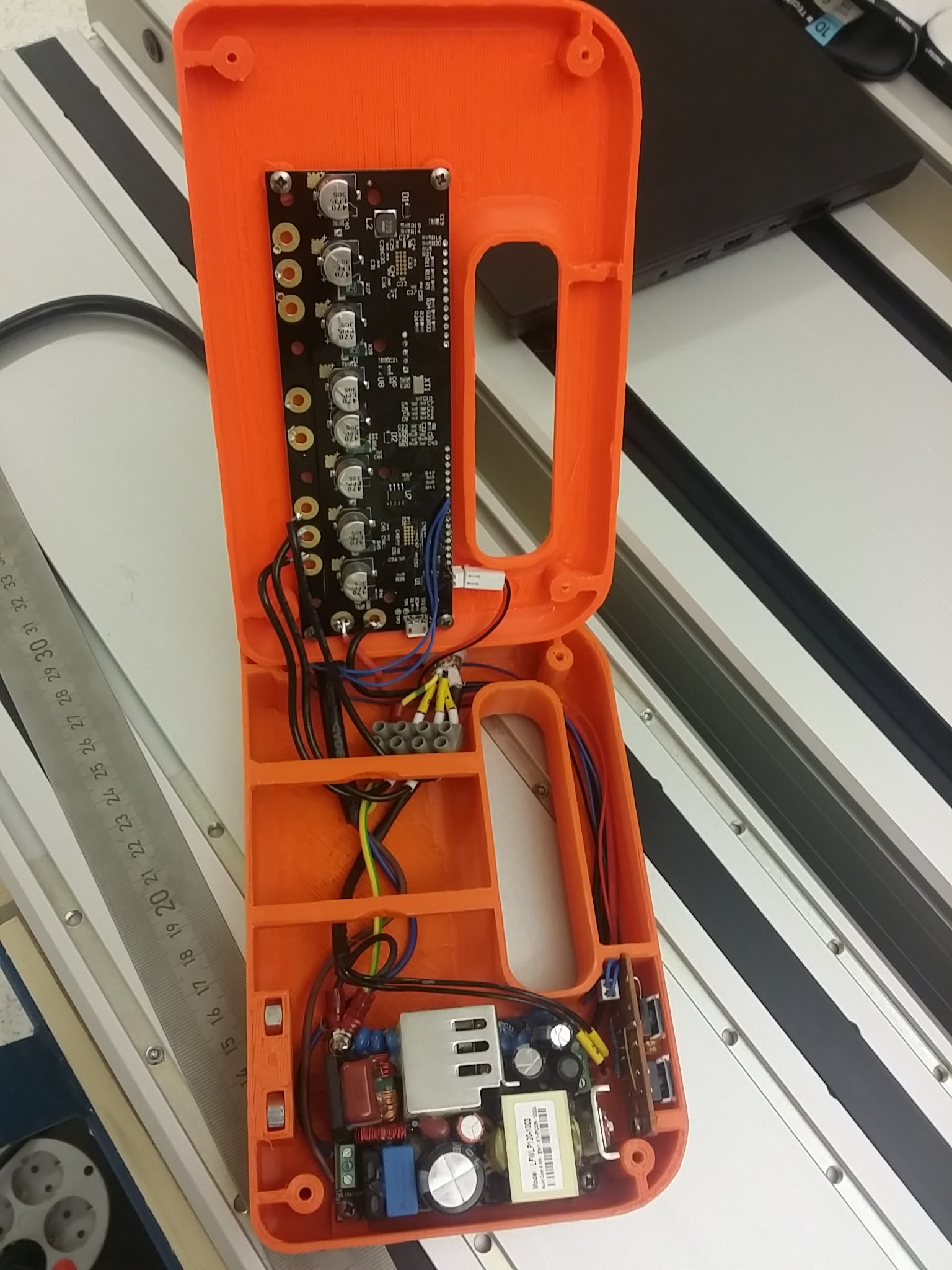
Hi, I just want to share my first ODrive build. At work, we needed a way to move the sledge our linear units during construction. I suggested the ODrive and we 3d printed a case that fits a 24V transformer and ODrive board. The unit has a forward and reverse button which is connected to GPIO1 and GPIO2, and is using the sensorless set-velocity mode. I had to change the firmware to support button control.

2 Likes
Very cool! We would love to see a video of it making the sled go!
I knew you’d ask, so I have a video prepared 
The discontinuity in the speed is the switch from sensorless spinup and “real” sensorless motion.
2 Likes