What tooth pitch is your belt/pulley?
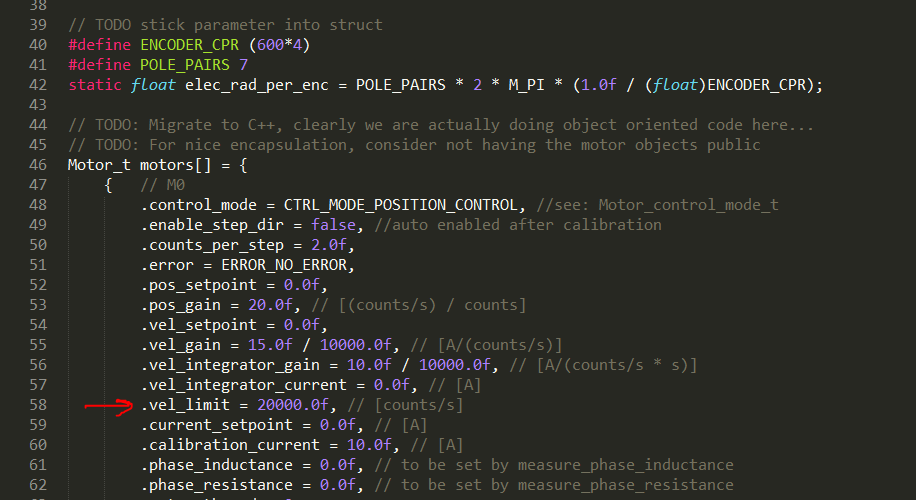
The first thing to check is that the velocity limit is set to something that is sensible in your application, the default is quite slow:
So 20k counts/s with 2400CPR encoder and 20t pulley and 2mm pitch belt = 33 cm/s. So that makes sense.
You can pick any max speed you think is safe, but don’t set it higher than 70% of base speed, as calculated in the Motor Guide with the appropriate inputs; or don’t set it higher than the encoder is rated for. The encoder I sell on the shop has a max speed of 400000 counts/s.