Hi. I have a weird problem
Encoder pull-up resistor is strange.
I am using a V3.5-48V ODrive.

The motor uses BLDC 24V, 100W, 3000RPM.
Gear ratio 1: 12.5
(motor information is in English, sorry.)
This motor uses Hall sensors on M0.
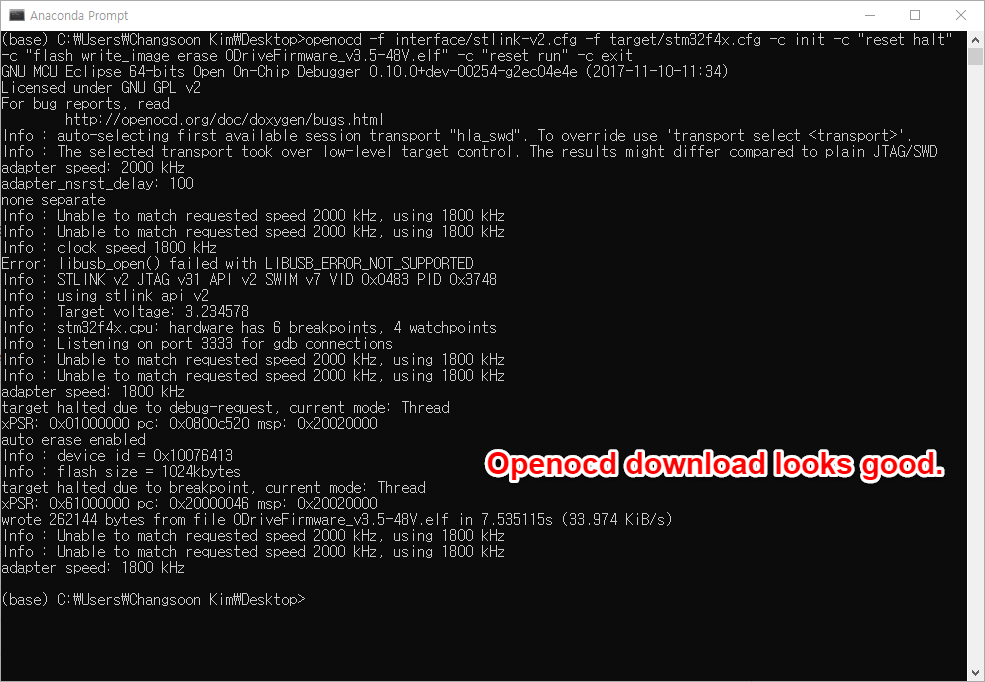
With reference to the hover board guide
odrv0.axis0.requested_state = AXIS_STATE_MOTOR_CALIBRATION
…
odrv0.axis0.requested_state = AXIS_STATE_ENCODER_OFFSET_CALIBRATION
And there were no errors.
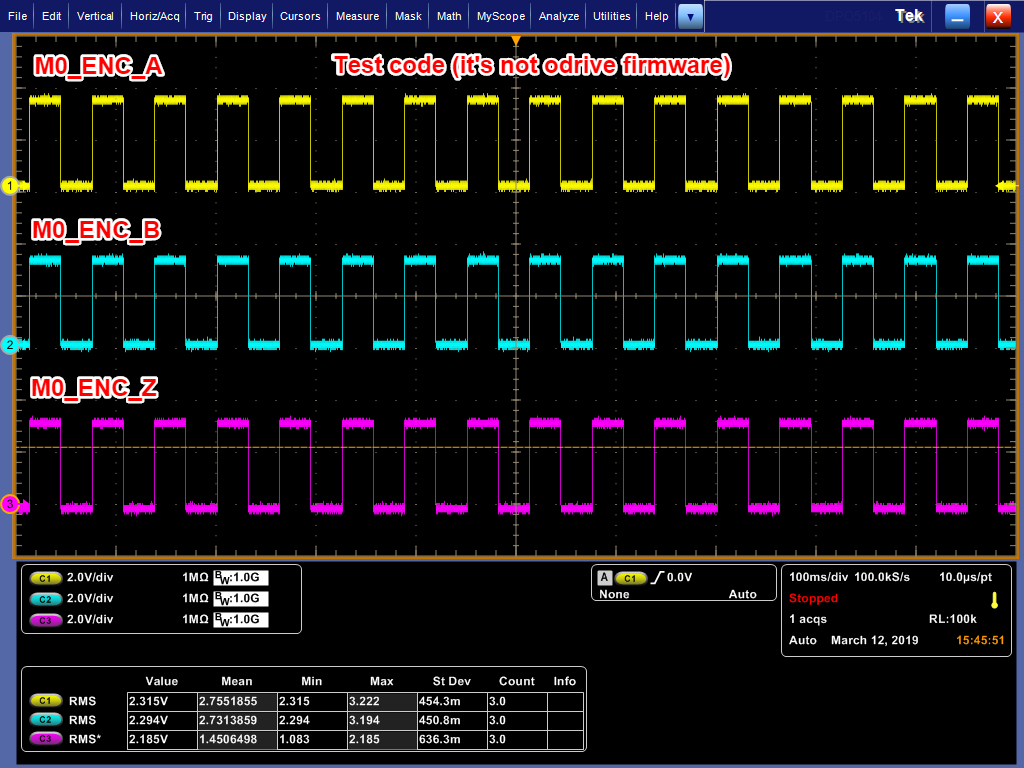
But…I checked the hall sensor waveform with the Oscilloscope
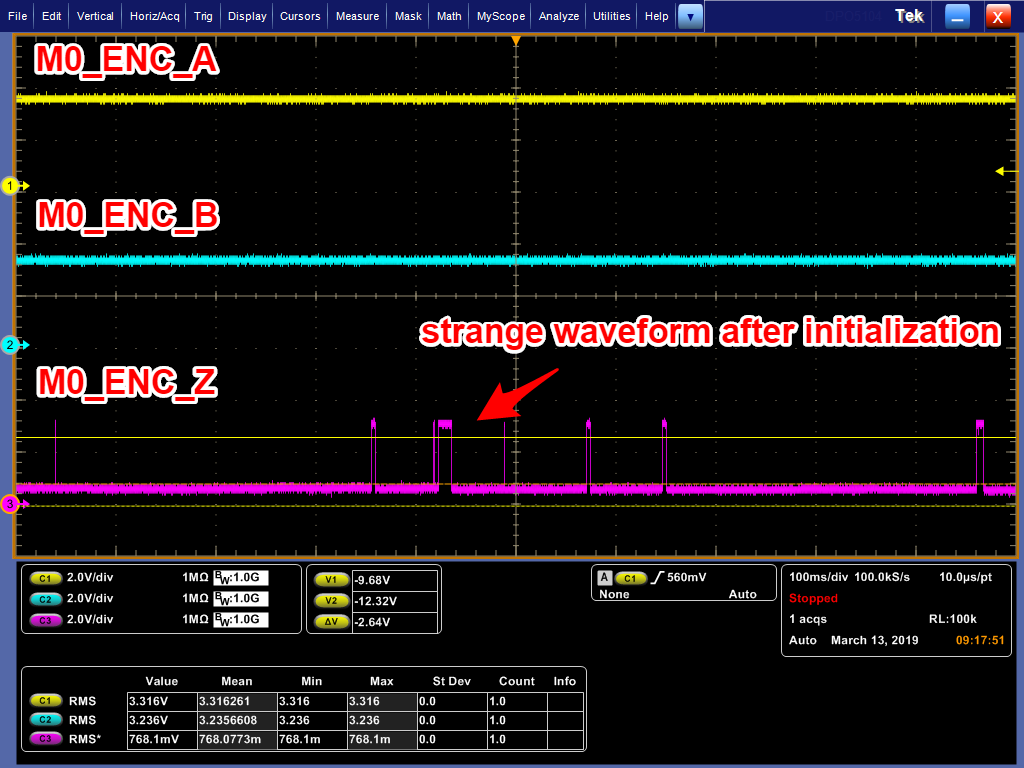
When ODrive power on, waveform of M0_ENC_Z should be 3.3V, but it is abnormal.


I think it is something wrong…
- Hall sensor connected : M0_ENC_Z is 0.8V
- Hall sensor not connected : M0_ENC_Z is 2V
The M0_ENC_Z waveform is also strange when turned by hand.

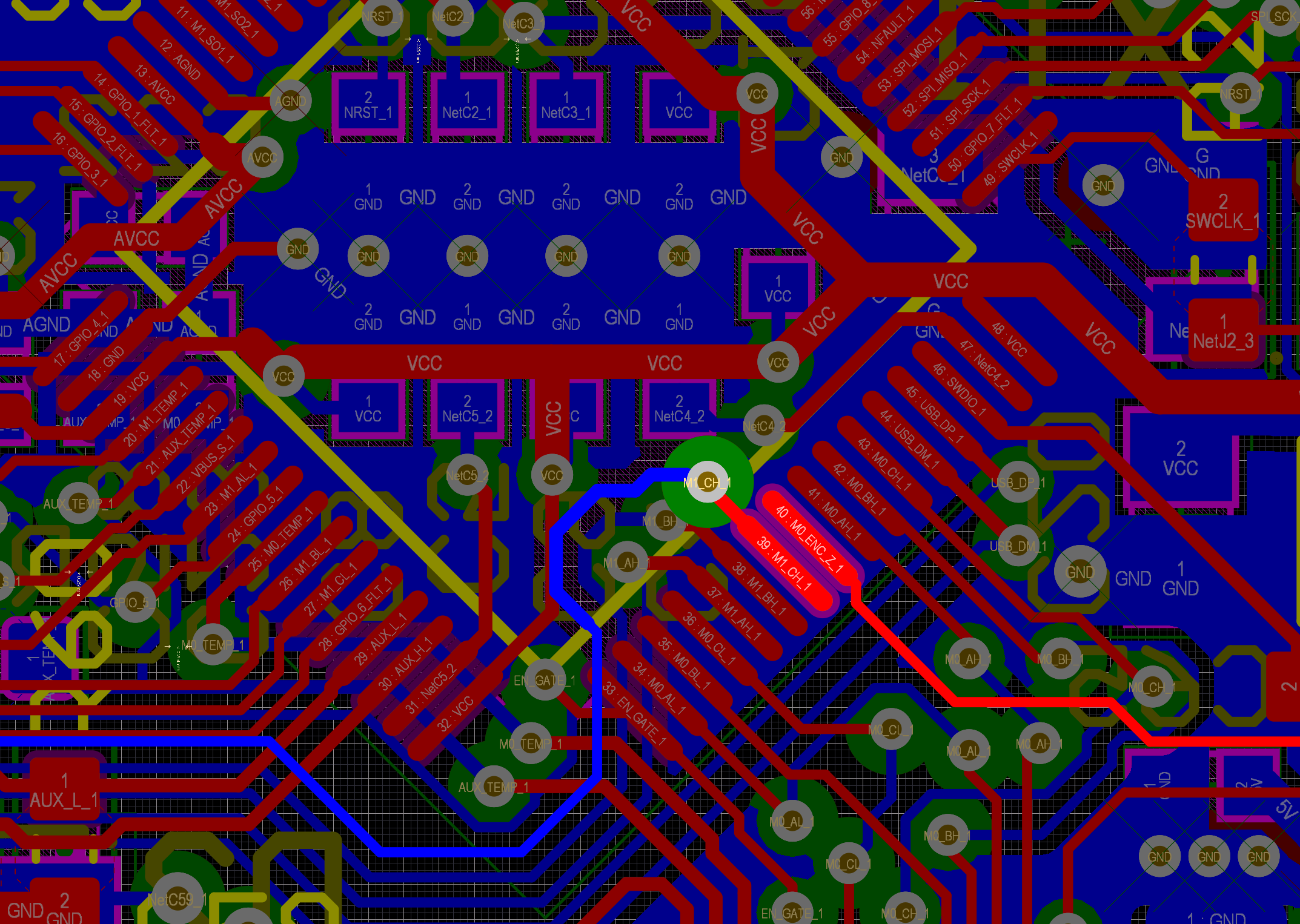
Pull-up resistor abnormal symptoms.
- Pull up resistor resistance between M0_ENC_A and M0_ENC_B
6.63Kohm => It looks okay.

(The M1 is normal with a resistance of 6.63Kohm, regardless of which pin is selected.)
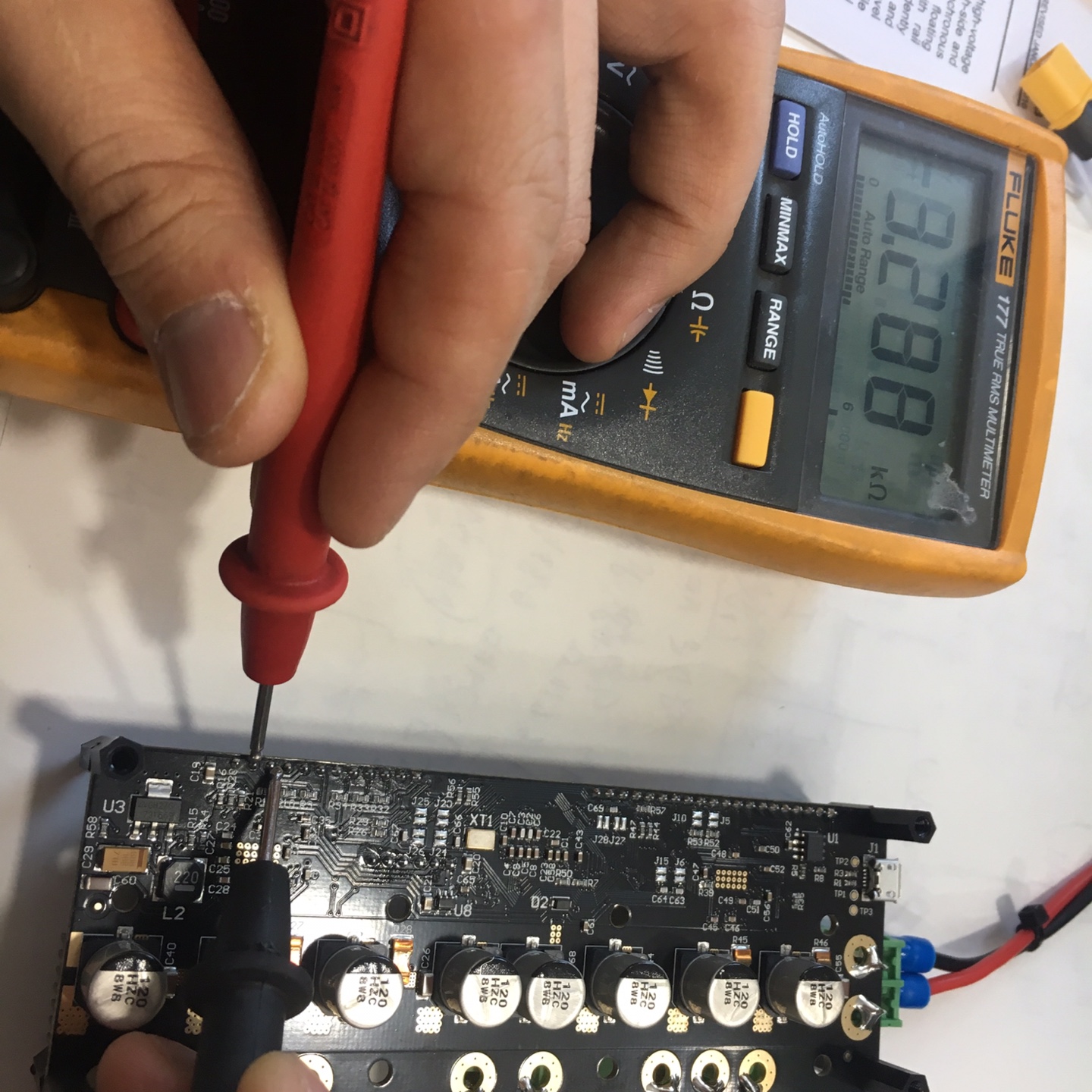
- Pull up resistor resistance between M0_ENC_B and M0_ENC_Z
3.299Kohm => abnormal
And… R11 Measured “81 ohm” in soldered condition.
I have not changed the resistor yet, but it is very strange.
I already seen other posts.(this & that) but i thought that it isn’t my case.
Thank you.