Hi kaikai, what encoder are you using? Can you upload a video of it doing the calibration procedure? My guess is that the CPR of your encoder is not actually 2000.
Hi @Nathan. It’s really a great work that inspires us a lot, and my friends and I are majoring in ur great project now.While we are facing a small but serious problem is that we don’t know how to run the script
https://github.com/Nate711/ODrive/blob/master/tools/doggo_setup.py to configure our ODrives.
I’ll appreciate a lot if you can tell me how to deal with it.
Hi Kaikai ,I want to ask for how to use doggo_setup.py configure the odrive. Is it in a python IDE ,or in the anaconda prompt?
I’ll appreciate a lot if u can help me.
Thanks.
Hi AlbertDT!
I use windows,install python3.7,Next use windows CMD, use cd command go to the doggo_setup.py folder。 use python doggo_setup.py set the odrive
Hi Nathan!
I found the problem, The AS5047D use 3.3V connect the ODrive,but i forget chane the AS5047D R1 to R2 ,this is the case cause the encoder error.
Thanks!
Thanks for your replying, KaiKai.
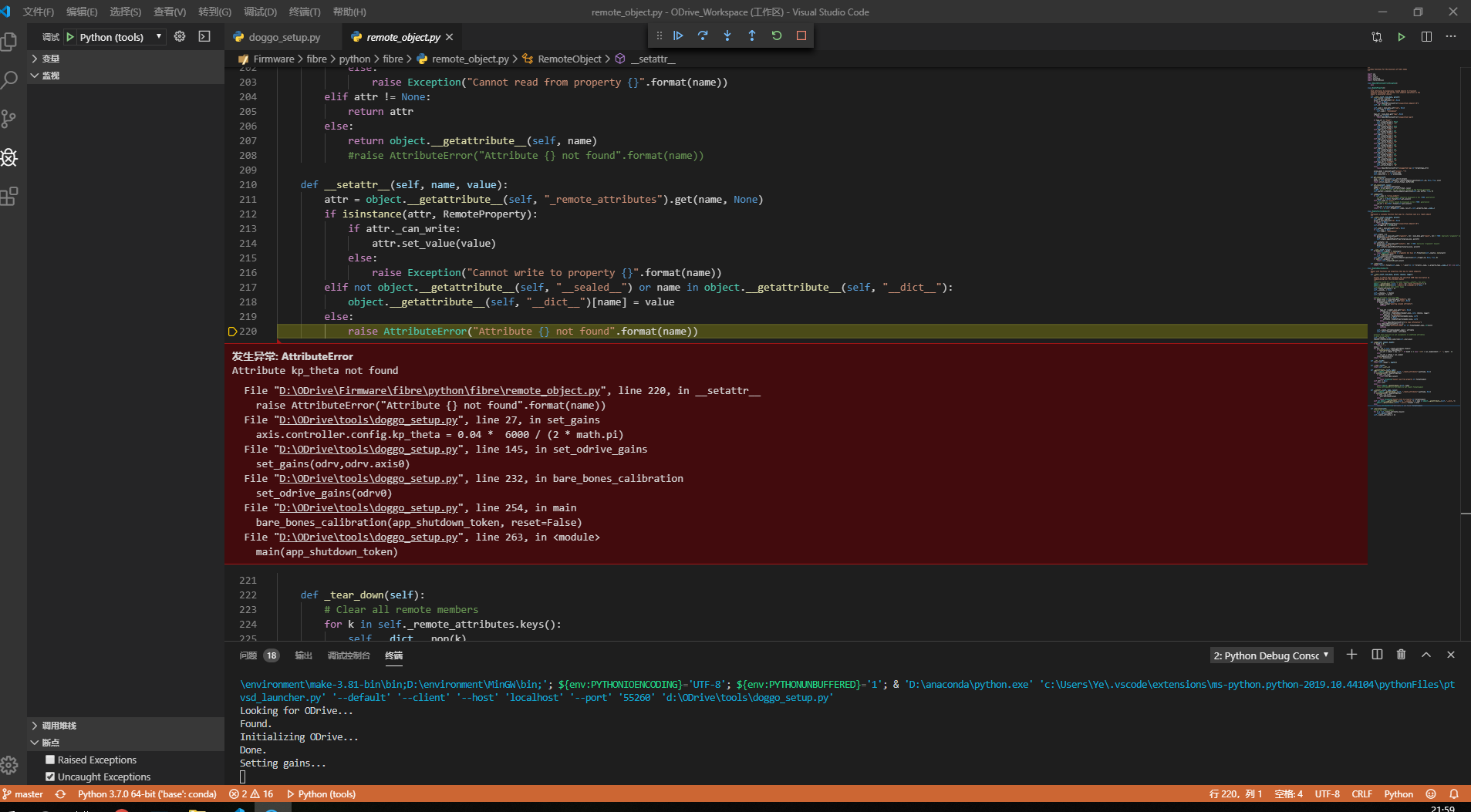
This is the frustration I’ve had. It tells me the attribute kp_theta can’t be found.Have you ever met this error before?
Hope for your reply!
Yours
Hi kaikai!
I wanna asking you about the CPR of the encorder. My encorder is the same with yours,AS5047D. Is it the CPR of that is 1000? And how to change to R2, I should connect the JP1 to the 3v3?
Hope for your reply.
Thanks.
Thanks for your sharing! I have a question about the Odrive velocity control. When I flash the official firmware of Odrive, I can control the motor’s velocity by the command “axis.controller.vel_setpoint” after setting “axis.controller.config.control_mode = CTRL_MODE_VELOCITY_CONTROL”. However, when flashing the doggo’s firmware, the command doesn’t work. I’m new to use the Odrive. Could you tell me why I cannot use the " CTRL_MODE_VELOCITY_CONTROL" when flashing the doggo’s firmware?
Hope your reply. Thank you very much!
I’m trying use BNO080 IMU to connect teensy by SPI.But I can not get any the value of bno080_imu.dataAvailable() is false.anyone have similar problems?
Hey Nathan, can I flash your custom firmware on ODrive V3.6 ?
Hello, crane I also have a similar problem, Did you found any solution for this problem?
Hi @Nathan, I clone the repositories from https://github.com/Nate711/StanfordDoggoProject. When I compile the modified ODrive firmware, some errors happened.
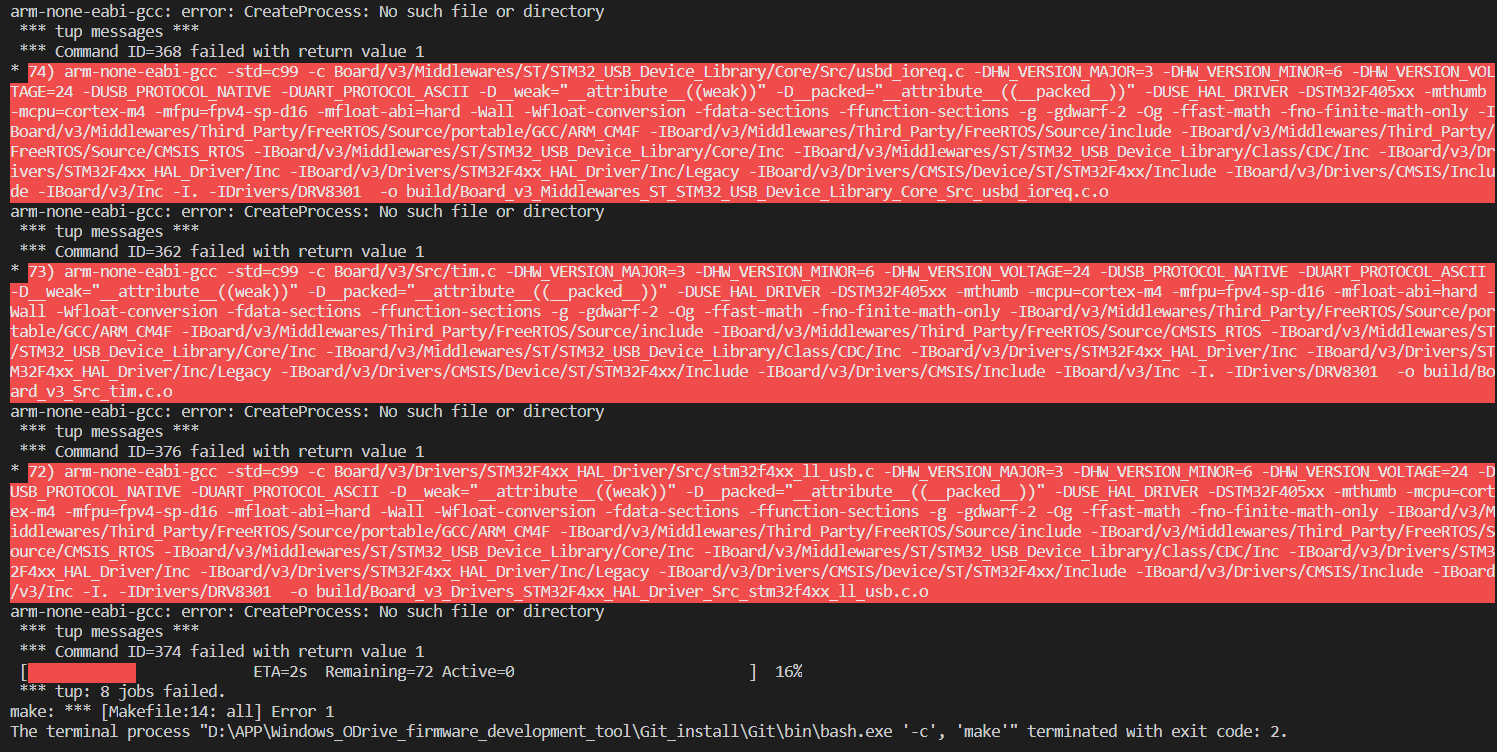
I have followed the steps of the official tutorial to build a firmware development environment in win10 OS.
What could be the problem? And anyone has similar problems? Can anybody offer me a help?
looks like you have no Arm GCC toolchain installed (or if it is installed, it’s not on your PATH)
1 Like
I have installed Arm GCC and tried different versions. Is my path set incorrectly?
Idk what’s up with that screenshot lol. what are you trying to show? Open a terminal anywhere on your pc and type arm-none-eabi-gcc --version. If it throws an error, your PATH is incorrect
Hey @Nathan @Wetmelon @madcowswe , I have followed all the instructions mentioned on the GitHub repo and Odrive documentation page. I’ve managed to build the custom Firmware with 3 warnings and flashed it on ODrive 3.6.
After this, I have uploaded the configuration by running the Doggo_setup.py file, configuration uploaded successfully. whenever I switch on the ODrive the motor calibration sequence starts and holds the position. But whenever I try to control the motors from UART communication the is no response. I’ve flashed the code of doggo using vs code with platform IO extension, the flash was successful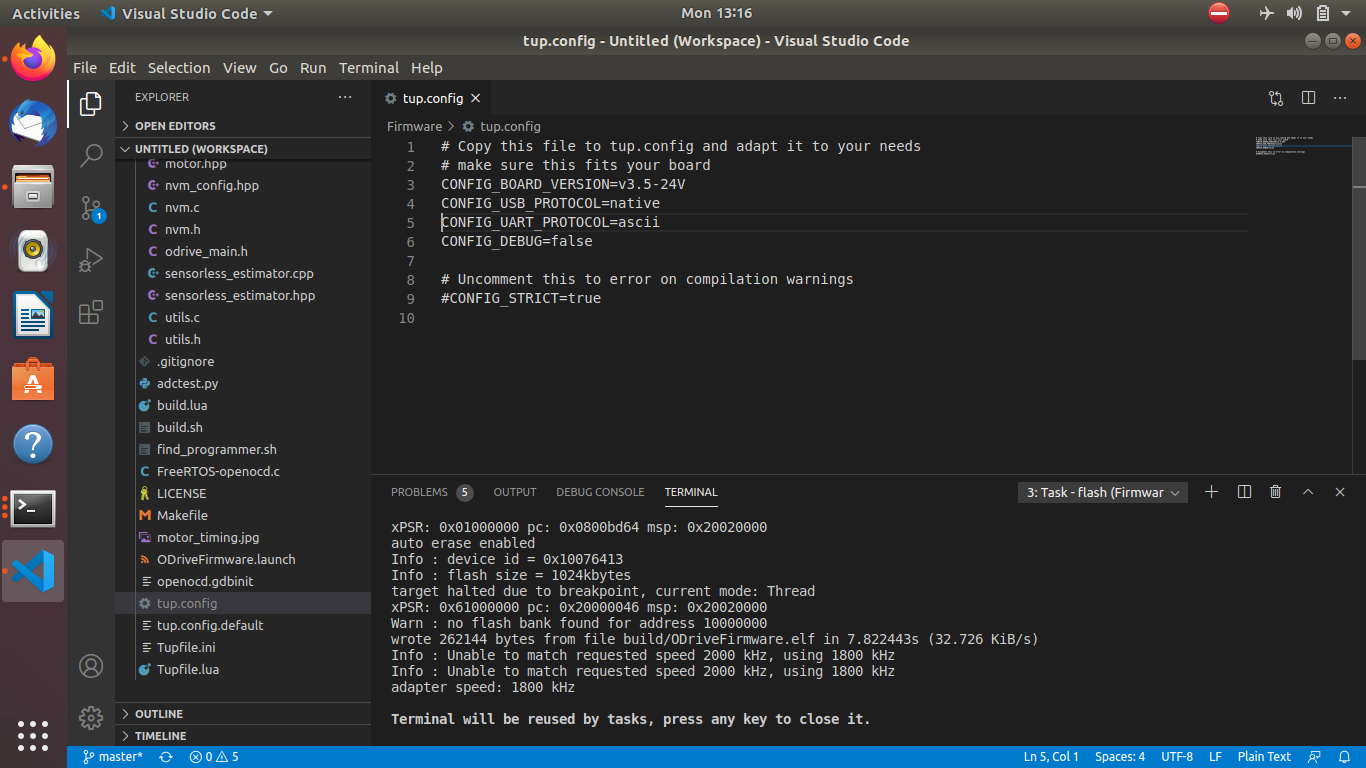
but whenever I try to send commands in the serial monitor there is no response from ODrive.
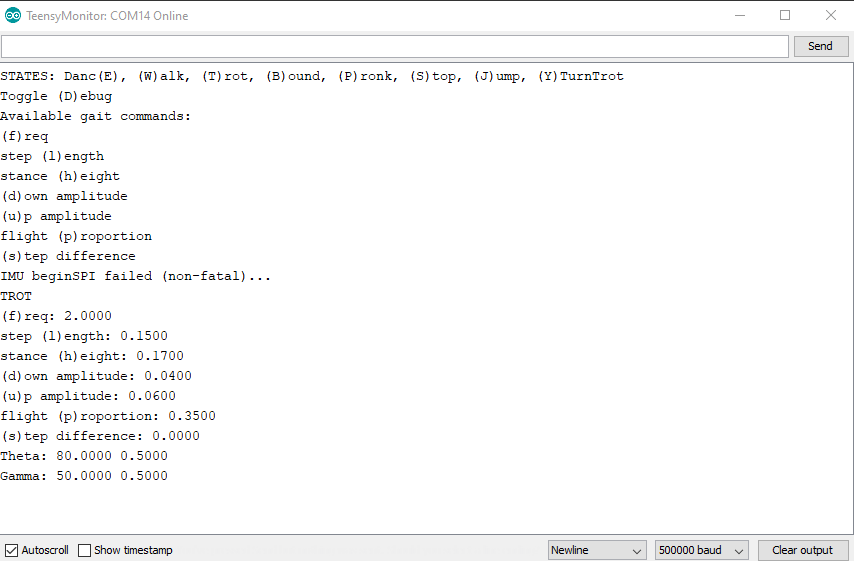
I tried the example code given in Odrive library uploaded on an Uno board I modified the baud rate to (500000) when tried reading the bus voltage it is returning 0.00

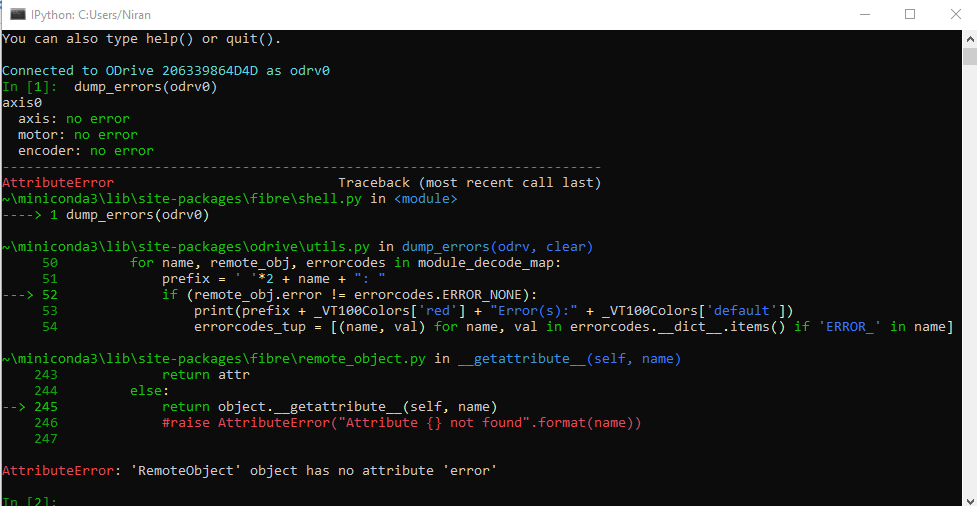
I tried dumping the error codes in odrive tool and there are no errors
I tried testing the Odrive in USB interface, ran the Demo.py scrip the motors were running.
All the connection were given as per the instructions mentioned.
I am not using an IMU sensor. Shoul i comment anay line in the source code ?
please help me in fixing this issue. thanks in advance.
Hi
Where is the your firmware to ODrive, because I don’t find hex or dfu file?
Hi @Niranjan_Vishnubhatl, read your post here. Did you manage to run the firmware on Odrive 3.6? I’m looking to develop this project on that.
yes I was able to run the firmware