During the process of final assembly, we found that the motor and the magnetic encoder may have bad contact, which may lead to the damage of Odrive. We would like to know whether you will ground the motor in the construction process, and how to do so?What do you do with the wiring of the magnetic encoder?
Hi Nathan
I use doggo_setup.py configure the odrive successs。Power On calibration motors and encoders success the motors can run.
(Teensy3.5) RX1 – (Odrive3.5-24V )GPIO1
(Teensy3.5) TX1 – (Odrive3.5-24V )GPIO2
Teensy3.5 connect Odrive success(I USE multimeter test it)
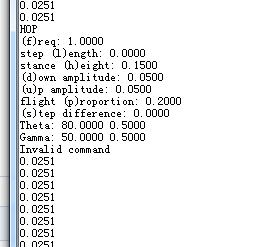
I use serials tool send command H, Teensy3.5 return message,but motors can,t run.
(what should i do can let motors run witch command).
The power outout 24V 5A。
Another question is the BOM display the odrive is 24V version,but the github say you use the ODrive is 48 whitch is the right version of ODrive.
Hi Nathan
I use doggo_setup.py configure the odrive successs。Power On calibration motors and encoders success the motors can run.
(Teensy3.5) RX1 – (Odrive3.5-24V )GPIO1
(Teensy3.5) TX1 – (Odrive3.5-24V )GPIO2
Teensy3.5 connect Odrive success(I USE multimeter test it)
I use serials tool send command H,receive Teensy3.5 message,but motors can,t run.
(what should i configure with Teensy3.5 can let motors run witch command).
The power outout 24V 5A。
Another question is the BOM display the odrive is 24V version,but the github say you use the ODrive is 48 whitch is the right version of ODrive.
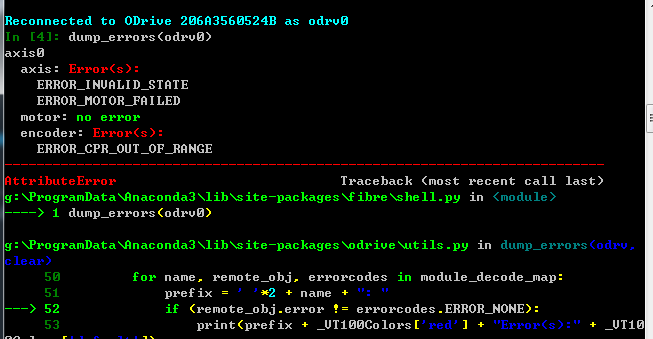
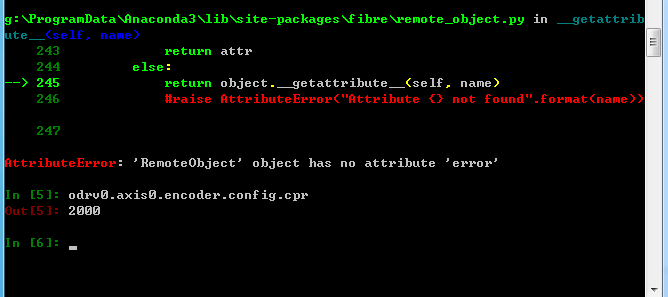
Hi kaikai, what encoder are you using? Can you upload a video of it doing the calibration procedure? My guess is that the CPR of your encoder is not actually 2000.
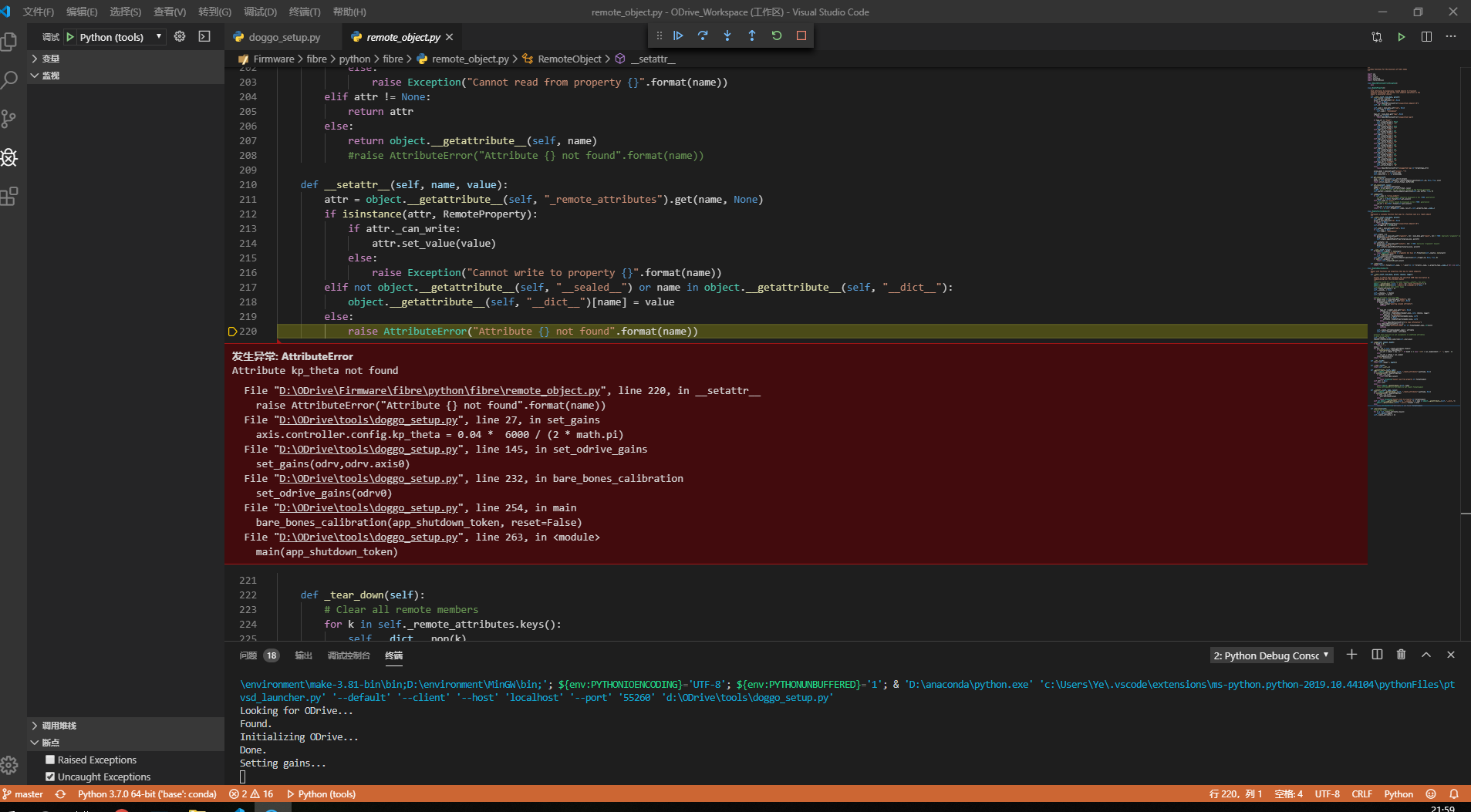
Hi @Nathan. It’s really a great work that inspires us a lot, and my friends and I are majoring in ur great project now.While we are facing a small but serious problem is that we don’t know how to run the script https://github.com/Nate711/ODrive/blob/master/tools/doggo_setup.py to configure our ODrives.
I’ll appreciate a lot if you can tell me how to deal with it.
Hi Kaikai ,I want to ask for how to use doggo_setup.py configure the odrive. Is it in a python IDE ,or in the anaconda prompt?
I’ll appreciate a lot if u can help me.
Thanks.
Hi AlbertDT!
I use windows,install python3.7,Next use windows CMD, use cd command go to the doggo_setup.py folder。 use python doggo_setup.py set the odrive
Hi Nathan!
I found the problem, The AS5047D use 3.3V connect the ODrive,but i forget chane the AS5047D R1 to R2 ,this is the case cause the encoder error.
Thanks!
Hi kaikai!
I wanna asking you about the CPR of the encorder. My encorder is the same with yours,AS5047D. Is it the CPR of that is 1000? And how to change to R2, I should connect the JP1 to the 3v3?
Hope for your reply.
Thanks.
Thanks for your sharing! I have a question about the Odrive velocity control. When I flash the official firmware of Odrive, I can control the motor’s velocity by the command “axis.controller.vel_setpoint” after setting “axis.controller.config.control_mode = CTRL_MODE_VELOCITY_CONTROL”. However, when flashing the doggo’s firmware, the command doesn’t work. I’m new to use the Odrive. Could you tell me why I cannot use the " CTRL_MODE_VELOCITY_CONTROL" when flashing the doggo’s firmware?
I’m trying use BNO080 IMU to connect teensy by SPI.But I can not get any the value of bno080_imu.dataAvailable() is false.anyone have similar problems?