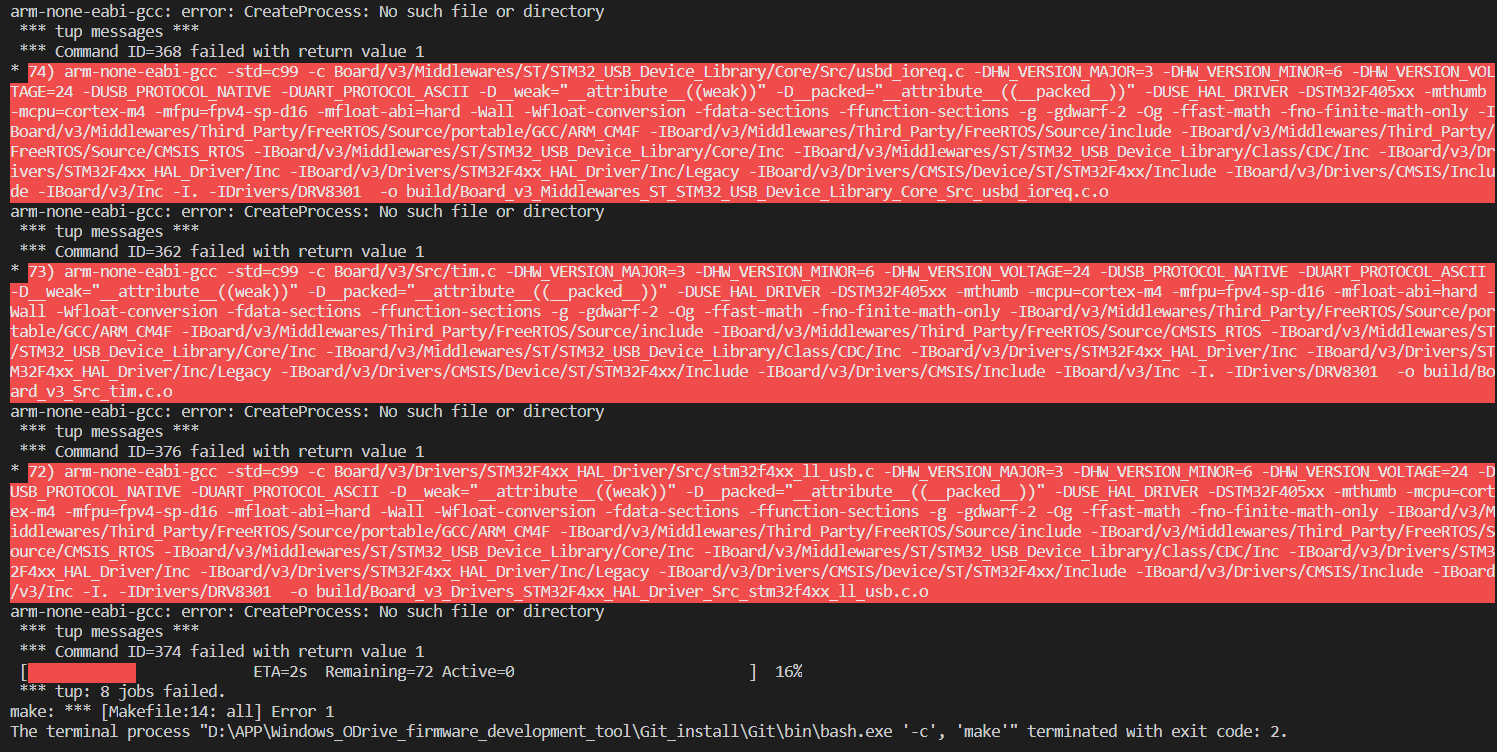
Idk what’s up with that screenshot lol. what are you trying to show? Open a terminal anywhere on your pc and type arm-none-eabi-gcc --version. If it throws an error, your PATH is incorrect
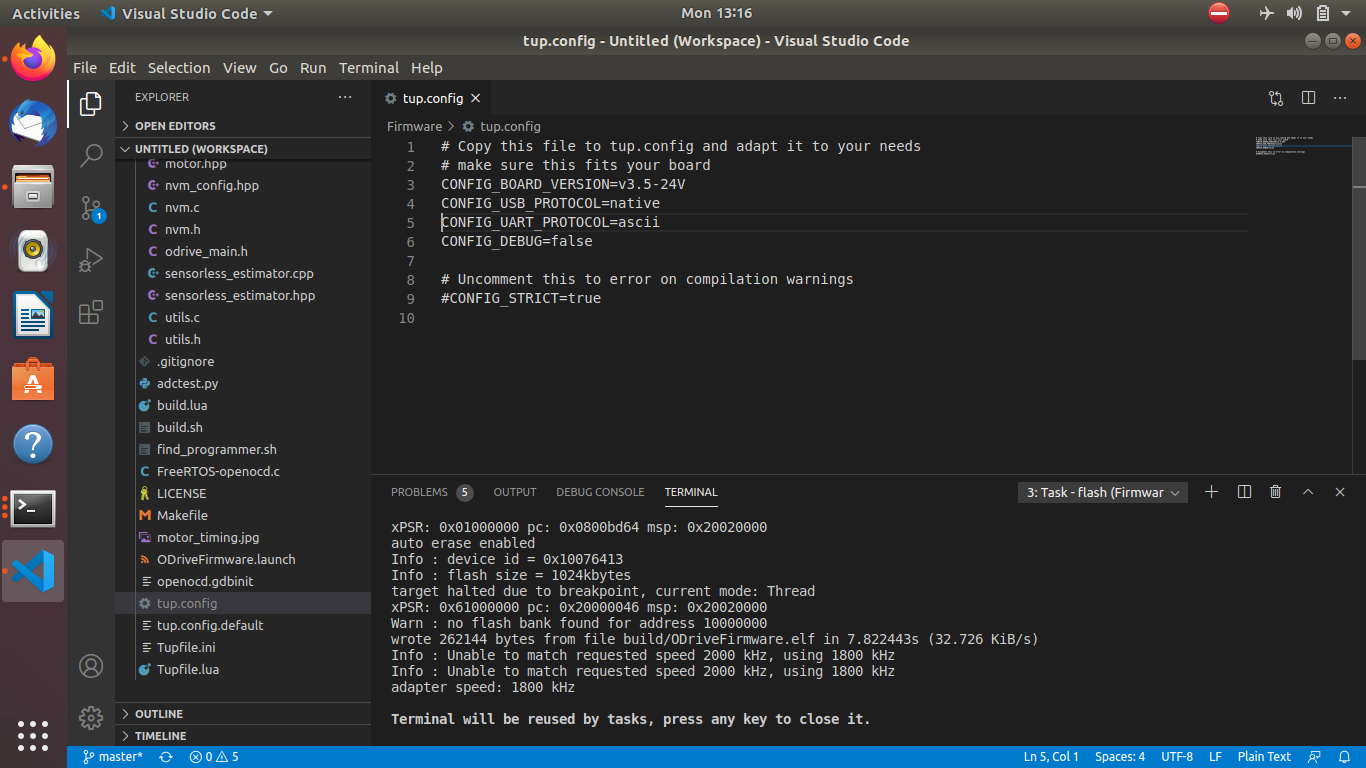
Hey @Nathan@Wetmelon@madcowswe , I have followed all the instructions mentioned on the GitHub repo and Odrive documentation page. I’ve managed to build the custom Firmware with 3 warnings and flashed it on ODrive 3.6.
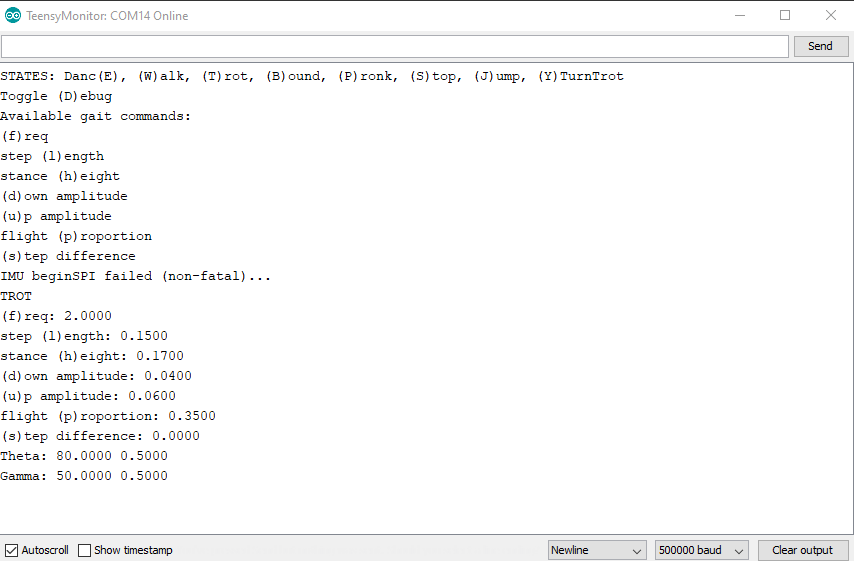
After this, I have uploaded the configuration by running the Doggo_setup.py file, configuration uploaded successfully. whenever I switch on the ODrive the motor calibration sequence starts and holds the position. But whenever I try to control the motors from UART communication the is no response. I’ve flashed the code of doggo using vs code with platform IO extension, the flash was successful
but whenever I try to send commands in the serial monitor there is no response from ODrive.
I tried the example code given in Odrive library uploaded on an Uno board I modified the baud rate to (500000) when tried reading the bus voltage it is returning 0.00
I tried testing the Odrive in USB interface, ran the Demo.py scrip the motors were running.
All the connection were given as per the instructions mentioned.
I am not using an IMU sensor. Shoul i comment anay line in the source code ?
please help me in fixing this issue. thanks in advance.