Hi all,
Im currently trying to build a very simple camera motion control system. It is basically just a camera mounted on a little 3d printed dolly that rolls on a track and is being pulled by a rope (connected to a motor pulley).
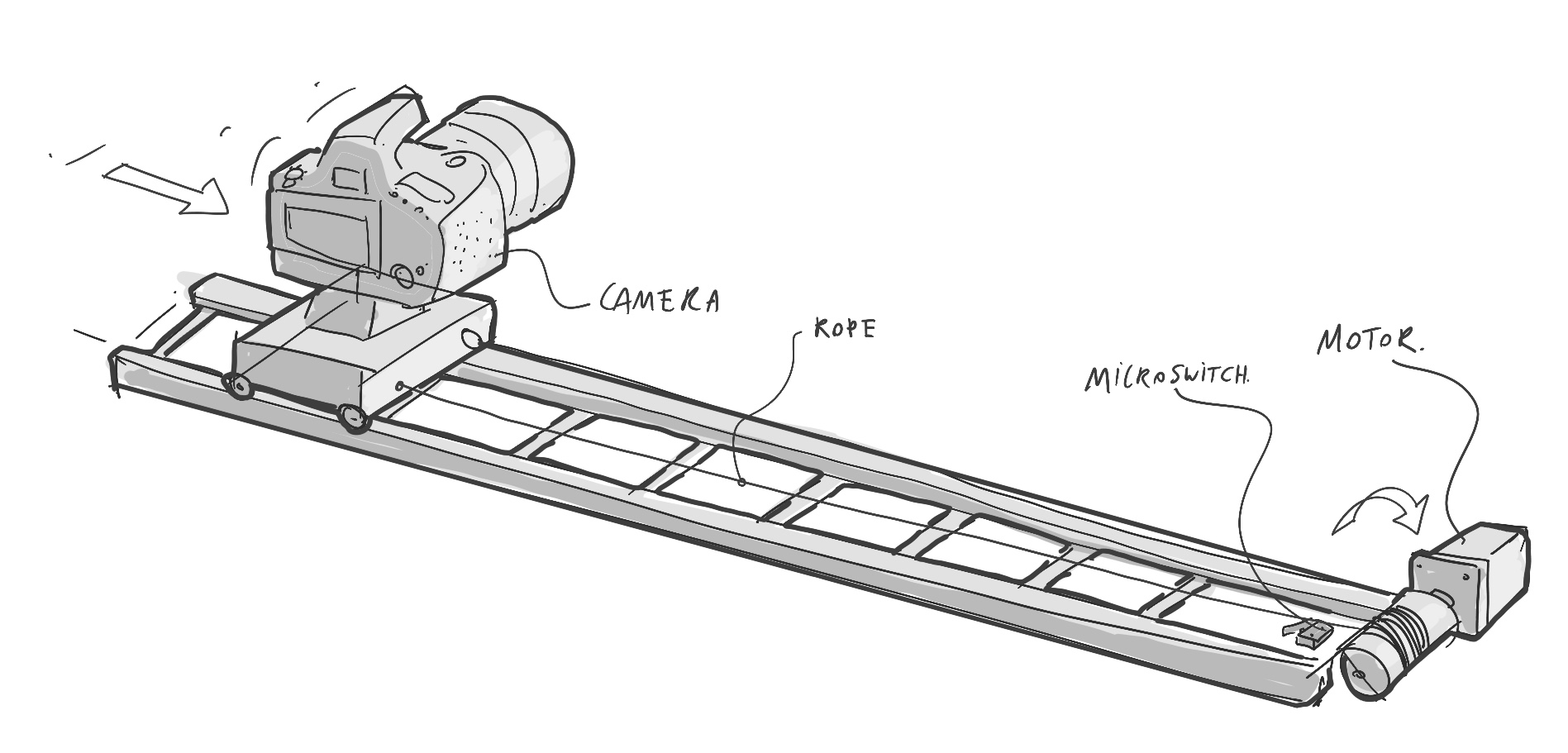
The idea is that every so often, when a counter hits a certain value, the motor rotates a little bit and thus pulls the camera further at a very slow speed. As a safety measure I would like to install a microswitch right before the motor. When the dolly hits the microswitch, the motor should stop (but still hold the position). So this will very likely happen in the middle of a new position command.
The odrive is controlled with arduino. Everything seems to be working (still testing offline, nothing connected to a camera yet…) but I dont feel confident in my current solution.
I tried to implement it by setting the speed to zero once the microswitch is pressed. I also read the motor position at this moment and tell the motor to go to that position (but it should off course stay in place now).
could anyone tell me if this is a good way to stop in the middle of a move?
Also I wonder if I can do an incremental move with arduino? It seems like the TrapezoidalMove is using an absolute position, and I worry about it overflowing…
All advice welcome
motor parameters:
// Setting motor parameters
odrive_serial << "w axis0.controller.config.vel_limit " << 10000.0f << '\n'; //this is counts/s
odrive_serial << "w axis0.motor.config.current_lim " << 20.0f << '\n'; //max is 60A
odrive_serial << "w axis0.motor.config.calibration_current " << 10.0f << '\n'; //to increase torque during calibration? //see https://docs.odriverobotics.com/api/odrive.motor.error
odrive_serial << "w axis0.controller.config.control_mode " << 3.0f << '\n'; //control mode
odrive_serial << "w axis0.controller.config.input_mode " << 5.0f << '\n'; // input mode trap trajectory
odrive_serial << "w axis0.trap_traj.config.vel_limit " << 2000.0f << '\n'; // some values chosen after some trail and error
odrive_serial << "w axis0.trap_traj.config.accel_limit " << 200.0f << '\n';// some values chosen after some trail and error
odrive_serial << "w axis0.trap_traj.config.decel_limit " << 200.0f << '\n';// some values chosen after some trail and error
code to control motor position:
if (counter == counter_treshold && endstop_value==HIGH){ //enstop_value high means the microswitch is not pressed
//take picture
//tell motor to rotate
motor_position+= motor_counts_for_one_move;
odrive.TrapezoidalMove(0, motor_position); //tell motor 0 to go to the new motor position
counter=0; // reset counter
}
if (endstop_value==LOW){ //if microswitch is pressed, motor should immediately stop rotating
// tell motor to stop
odrive.SetVelocity(0 ,0.0f);
// tell motor to stay at this position
delay(100);
odrive_serial << "r axis0.encoder.pos_estimate\n";
odrive.TrapezoidalMove(0, odrive.readFloat());
}```
