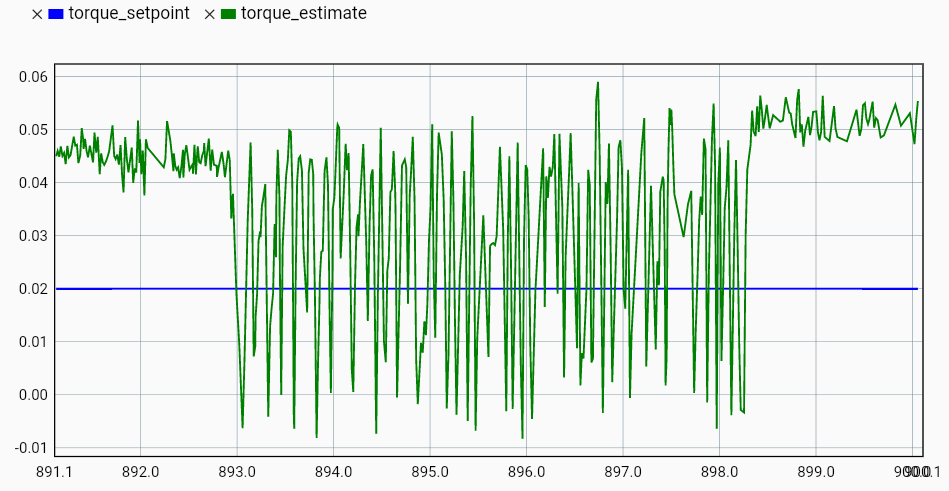
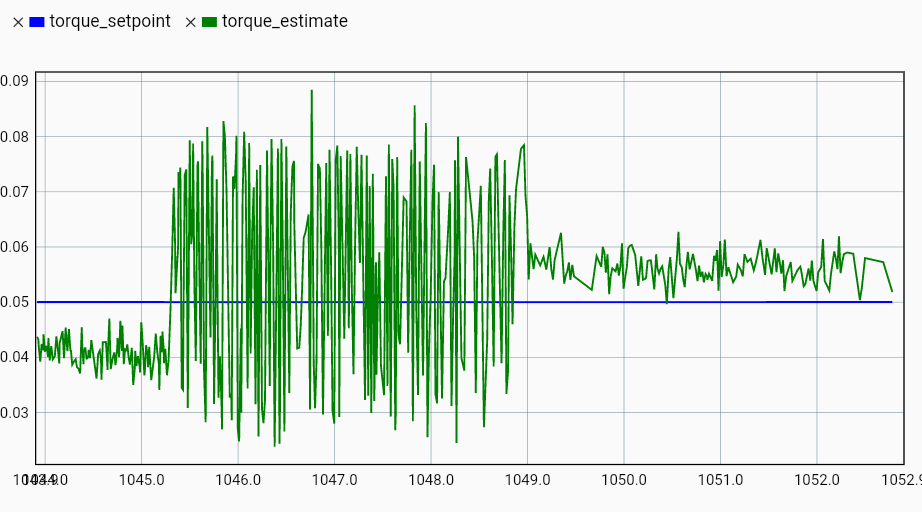
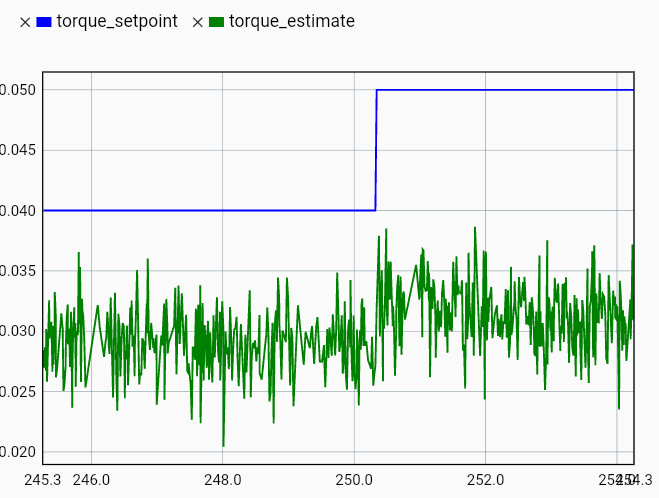
Hi, I’m trying to implement a torque control with an ODrive Pro for this motor and the OA1 encoder. The ODrive was calibrated with the anti-cogging feature and works fine in velocity control at low speeds. Now I was trying to control it in torque and my system was not behaving as expected, so I started to look into how the ODrive was behaving in specific. If I give the ODrive a torque setpoint manually, it doesn’t seem like the control follows the setpoint properly:
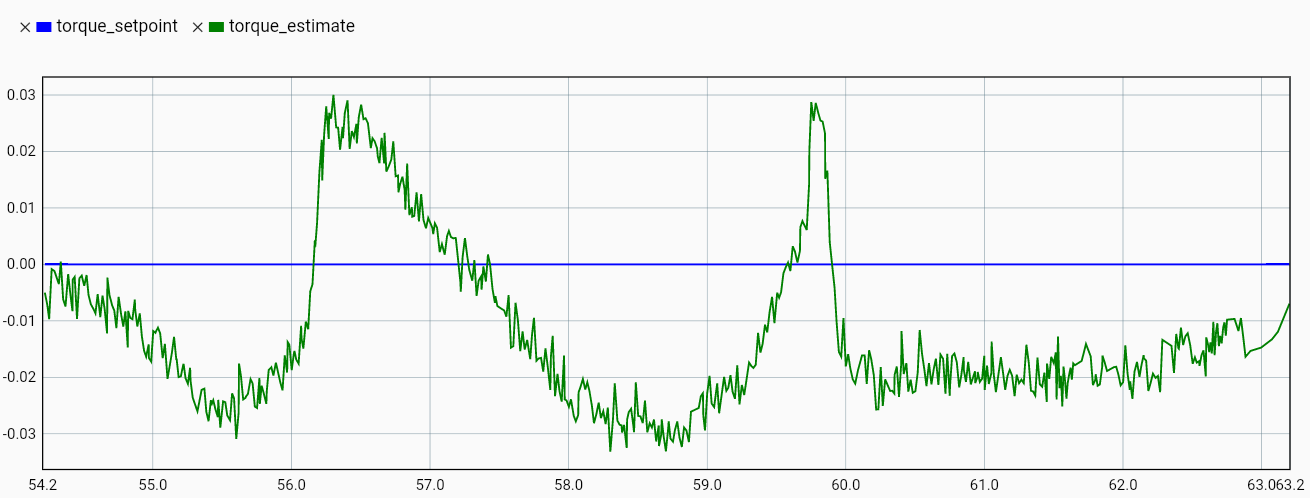
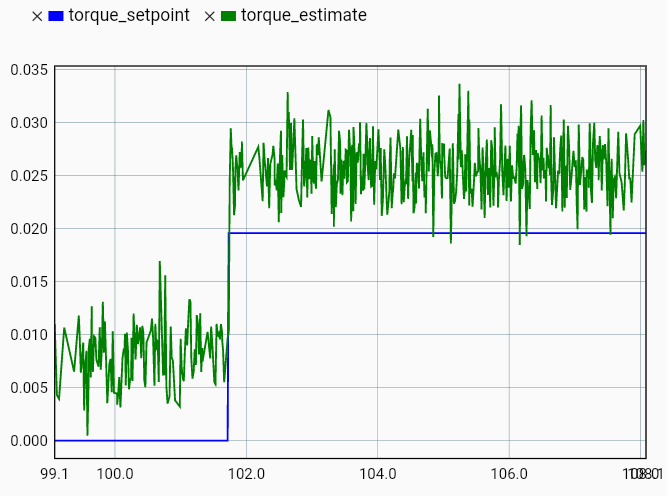
The first thing that is weird to me is the noise in the torque_estimate and the apparent offset between the 2 signals.
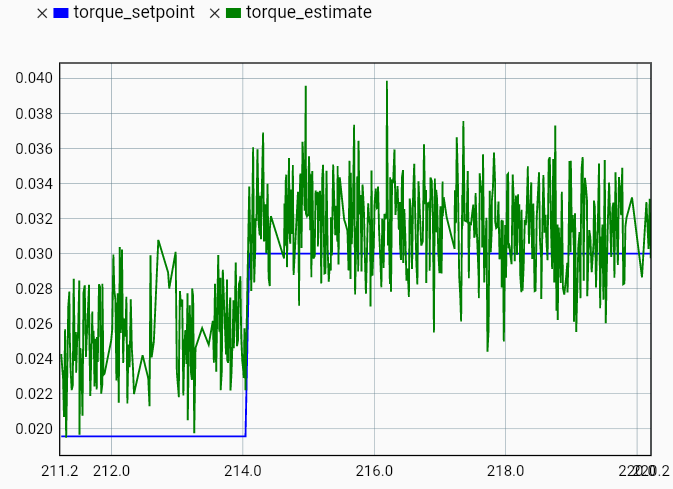
current_control_bandwidth is set to 1000 but even changing it to a lower value seems to change the behavior of the system.
Just as context, I basically have a system of rope and pulleys, where the motor is pulling the rope with a set of fixed pulleys interconnected by gears.