Hi everyone,
I’m working with a Nanotec BLDC motor 416.67 kv and I can’t seem to get it tuned correctly. I’ve tried following the tuning guidelines no luck. The calibration causes no errors and the encoders AMT103-V 2048 PPR I’m using seem to work as well.
Here are my configs.
axis
startup_motor_calibration = False (bool)
startup_encoder_index_search = False (bool)
startup_encoder_offset_calibration = False (bool)
startup_closed_loop_control = False (bool)
startup_sensorless_control = False (bool)
enable_step_dir = False (bool)
counts_per_step = 2.0 (float)
step_gpio_pin = 1 (int)
dir_gpio_pin = 2 (int)
ramp_up_time = 0.4000000059604645 (float)
ramp_up_distance = 12.566370964050293 (float)
spin_up_current = 10.0 (float)
spin_up_acceleration = 400.0 (float)
spin_up_target_vel = 400.0 (float)
controller
control_mode = 3 (int)
pos_gain = 7.0 (float)
vel_gain = 1.0000000116860974e-07 (float)
vel_integrator_gain = 0.0 (float)
vel_limit = 80000000.0 (float)
vel_limit_tolerance = 1.2000000476837158 (float)
vel_ramp_rate = 1.0 (float)
setpoints_in_cpr = False (bool)
motor
pre_calibrated = True (bool)
pole_pairs = 2 (int)
calibration_current = 0.949999988079071 (float)
resistance_calib_max_voltage = 8.0 (float)
phase_inductance = 0.0010457956232130527 (float)
phase_resistance = 2.7222201824188232 (float)
direction = 1 (int)
motor_type = 0 (int)
current_lim = 2.700000047683716 (float)
requested_current_range = 2.700000047683716 (float)
current_control_bandwidth = 10.0 (float)
encoder
mode = 0 (int)
use_index = True (bool)
pre_calibrated = True (bool)
idx_search_speed = 10.0 (float)
zero_count_on_find_idx = True (bool)
cpr = 8192 (int)
offset = 16372 (int)
offset_float = 1.0242187976837158 (float)
bandwidth = 10.0 (float)
calib_range = 0.019999999552965164 (float)
calibration values
current_meas_phB = -0.13242359459400177 (float)
current_meas_phC = 0.017752788960933685 (float)
DC_calib_phB = -0.04886918514966965 (float)
DC_calib_phC = -0.11841728538274765 (float)
phase_current_rev_gain = 0.012500000186264515 (float)
current_control:
p_gain = 0.010457956232130527 (float)
i_gain = 27.22220230102539 (float)
v_current_control_integral_d = -0.05697176977992058 (float)
v_current_control_integral_q = -0.03862487152218819 (float)
Ibus = 0.00032590687624178827 (float)
final_v_alpha = 0.03676741197705269 (float)
final_v_beta = -0.057533249258995056 (float)
Iq_setpoint = 0.0013523530215024948 (float)
Iq_measured = -0.1383826732635498 (float)
max_allowed_current = 30.375 (float)
overcurrent_trip_level = 33.75 (float)
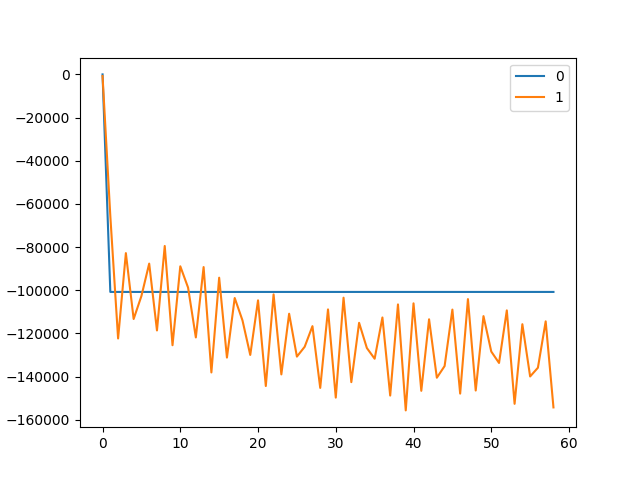
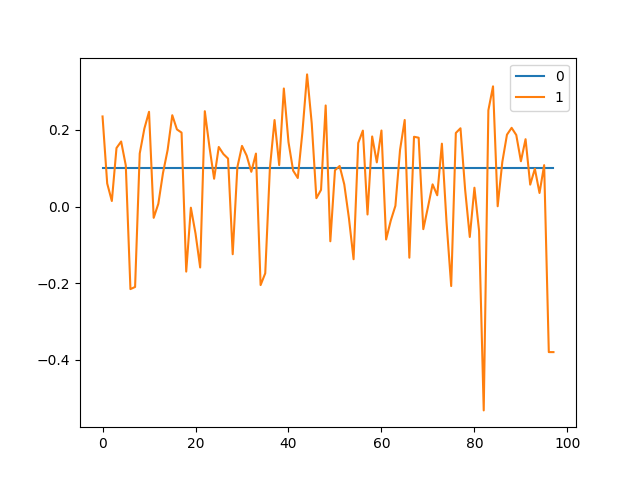
Some plots I have.
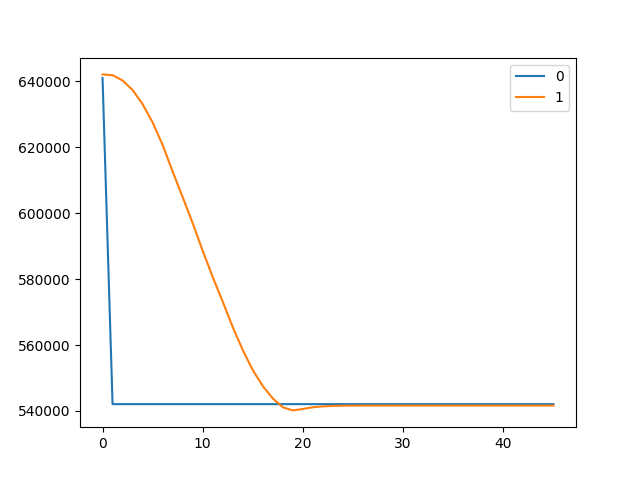
I can only seem to post one picture, but I cannot follow a sinusoid. of a similar amplitude. If I set to circular position, there are also issues.
Any help is much appreciated!