Hello
I posted a YouTube video explaining how a tubular linear synchronous motor (LSM) works, utilizing a numerical model in Python, and also demonstrating how to build one yourself and drive it using an ODrive V3.
The numerical model is built up step by step, resulting in:
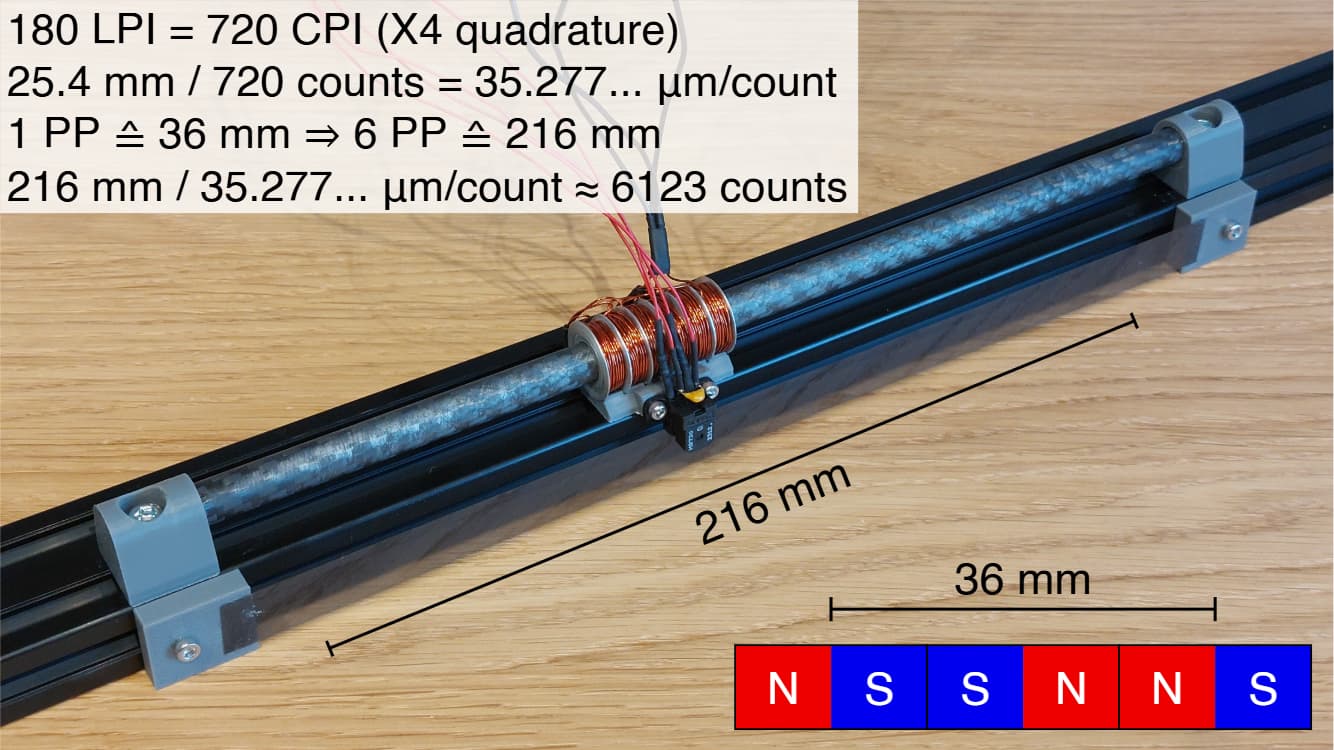
For the ODrive configuration, I entered 6 pole pairs and 6123 counts/rev to take a large section of the stroke into account during the offset calibration.
You can watch the full video here (YoutTube link):
Stijn