Hello,
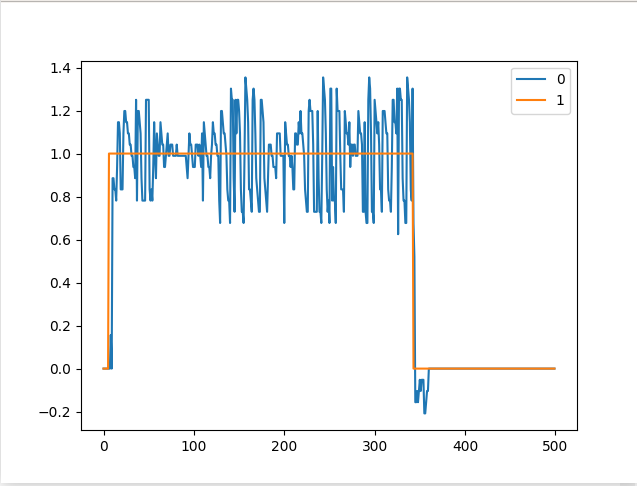
I am using Hoverboard motors but due to its low encoder resolution, I am using an external rotatory encoder with cpr of 2400. I am following the tuning guide mentioned in the Odrive doc. The position control graph seems to be fine but there is a lot of fluctuation in my velocity control graph.
Velocity Control Graph:
Please help me in how to proceed with the tuning.
Omkar