When using velocity control
odrv0.axis0.controller.config.control_mode = ControlMode.VELOCITY_CONTROL
it seems as though the odrive is commanding the motor to turn to a position rather than a set velocity.
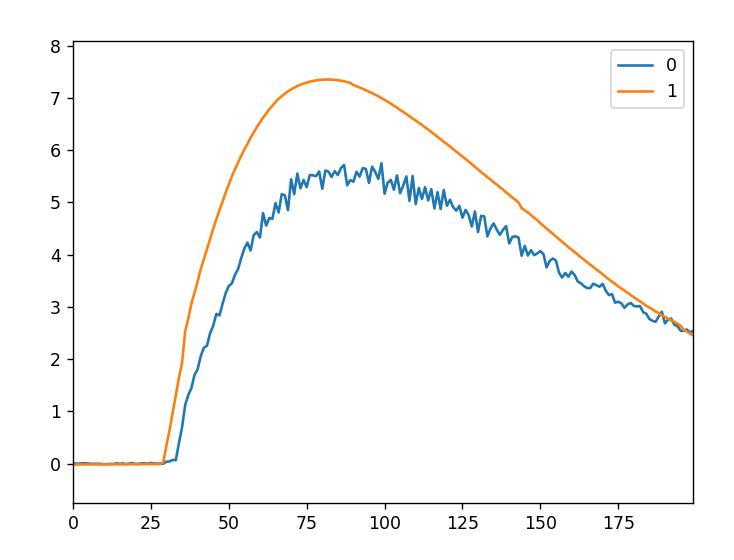
The attached image is plot of
start_liveplotter(lambda:[odrv0.axis0.pos_vel_mapper.vel, odrv0.axis0.controller.vel_setpoint])
In that image, velocity was set to 10 and actual commanded value never seemed to make it that high, then it quickly tapers off and returns to zero despite the velocity still being set to 10.
Any help would be greatly appreciated!
Odrive S1
Antigravity MN5006 KV300
16384 CPR ABSOLUTE RS485 ENCODER WITH CABLE FOR ODRIVE PRO OR S1