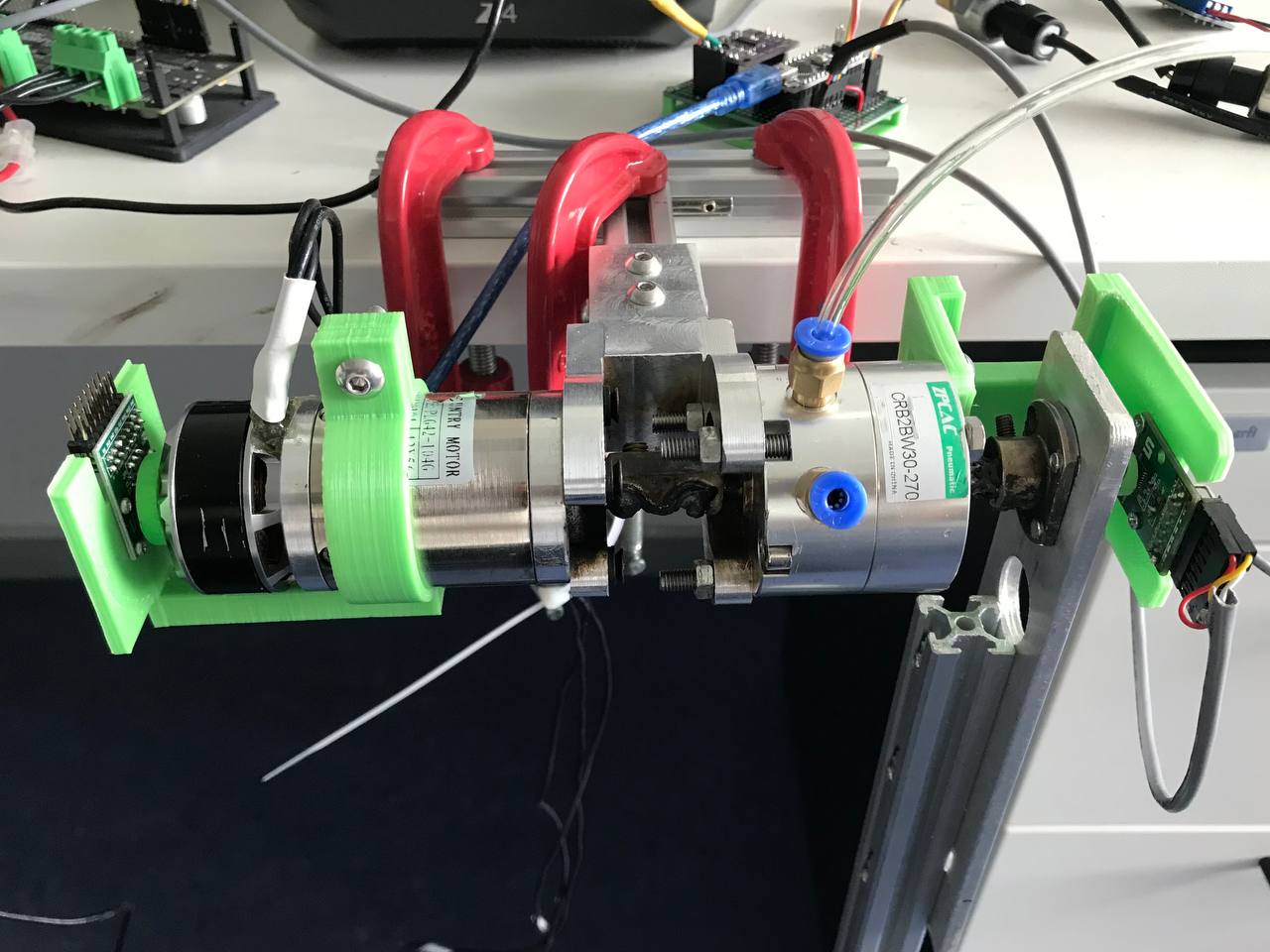
Currently I am doing an experiment that measures torque required to overcome static friction of the actuator elements and counter torque created by rotational pneumatic valve (pneumatic actuator). During this experiment I switch motor to TORQUE_CONTROL mode and gradually increase torque. Once the motor starts moving I measure torque, pressure in pneumatic valve and initial position of the motor. I need to repeat this experiment several times from the same starting position in order to exclude influence of a 30-cm bar attached to the output shaft
In Python code I switch to TORQUE_CONTROL as follows:
def odrive_torque_control(odrv):
odrv.axis0.controller.config.control_mode = CTRL_MODE_TORQUE_CONTROL # 1
odrv.axis0.controller.config.input_mode = INPUT_MODE_PASSTHROUGH # 1
odrv.axis0.motor.config.torque_constant = 8.27 / 600.0
odrv.axis0.controller.input_torque = 0
print(“Torque Control Mode is operational”)
And it works perfectly well. I can execute the main part of the experiment.
Then I want to switch to POSITION_CONTROL mode in order to rotate motor back to the same position using this part of the code:
def odrive_position_control(odrv):
odrv.axis0.controller.config.control_mode = CTRL_MODE_POSITION_CONTROL # 3
odrv.axis0.controller.config.input_mode = INPUT_MODE_POS_FILTER # 3
print(“Position Control Mode is operational”)
Motors starts vibrating and produces low pitch sound. Can you please give me some guidelines what can be done in order to fix this issue?