I am using odrive v3.6 and Motor - D5065 270kv
When the wheel is spinning, if you hold it with your hand and release it, it will spin quickly for a moment and the motor will stop.
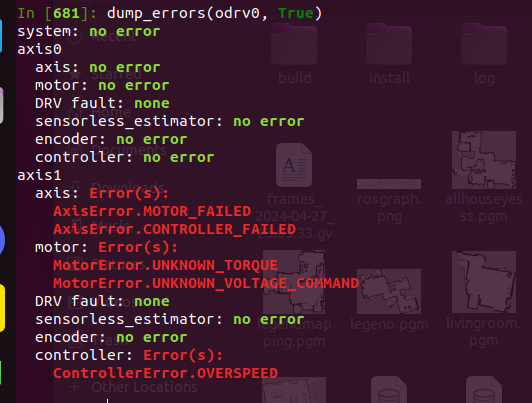
And i can see this error code
And this is my odrive parameter
Thank you for read my post
| parameter | total | 0 motor | 1 motor | Unit | |
|---|---|---|---|---|---|
| ODrive Config (System-wide Configuration) | |||||
| odrvX.config.brake_resistance | 2 | [Ω] | |||
| odrvX.config.enable_uart | X | ||||
| odrvX.config.enable_i2c_instead_of_can | X | ||||
| odrvX.config.enable_ascii_protocol_on_usb | X | ||||
| odrvX.config.dc_bus_undervoltage_trip_level | 8 | [V] | |||
| odrvX.config.dc_bus_overvoltage_trip_level | 59.92 | [V] | |||
| odrvX.config.dc_max_positive_current | inf | [A] | |||
| odrvX.config.dc_max_negative_current | -0.00999 | [A] | |||
| odrvX.config.max_regen_current | 0 | [A] | |||
| odrvX.config.enable_brake_resistor | TRUE | bool | |||
| odrvX.config.max_output_dc_bus_voltage | X | ||||
| Axis Configuration (Per-Axis Settings) | |||||
| odrvX.axisX.config.startup_motor_calibration | FALSE | FALSE | bool | ||
| odrvX.axisX.config.startup_encoder_index_search | FALSE | FALSE | bool | ||
| odrvX.axisX.config.startup_encoder_offset_calibration | FALSE | FALSE | bool | ||
| odrvX.axisX.config.startup_closed_loop_control | FALSE | FALSE | bool | ||
| odrvX.axisX.config.startup_sensorless_control | X | X | |||
| odrvX.axisX.config.enable_step_dir | FALSE | FALSE | bool | ||
| odrvX.axisX.config.counts_per_step | X | X | |||
| odrvX.axisX.config.step_dir_always_on | FALSE | FALSE | bool | ||
| odrvX.axisX.config.watchdog_timeout | 0 | 0 | s | ||
| odrvX.axisX.config.enable_watchdog | FALSE | FALSE | bool | ||
| odrvX.axisX.config.lockin.current | X | X | |||
| odrvX.axisX.config.lockin.ramp_time | X | X | |||
| odrvX.axisX.config.lockin.ramp_distance | X | X | |||
| odrvX.axisX.config.lockin.accel | X | X | |||
| odrvX.axisX.config.lockin.vel | X | X | |||
| odrvX.axisX.config.lockin.finish_distance | X | X | |||
| odrvX.axisX.config.lockin.finish_on_vel | X | X | |||
| odrvX.axisX.config.lockin.finish_on_distance | X | X | |||
| odrvX.axisX.config.lockin.finish_on_enc_idx | X | X | |||
| Motor Configuration | |||||
| odrvX.axisX.motor.config.pre_calibrated | FALSE | FALSE | bool | ||
| odrvX.axisX.motor.config.pole_pairs | 7 | 7 | int | ||
| odrvX.axisX.motor.config.calibration_current | 10 | 10 | [A] | ||
| odrvX.axisX.motor.config.resistance_calib_max_voltage | 2 | 2 | [V] | ||
| odrvX.axisX.motor.config.phase_inductance | 1.47E-05 | 2.13E-05 | [H] | ||
| odrvX.axisX.motor.config.phase_resistance | 0.05062 | 0.05009 | [Ω] | ||
| odrvX.axisX.motor.config.direction | X | X | |||
| odrvX.axisX.motor.config.motor_type | 0 | 0 | 0: High Current 1: Gimbal | ||
| odrvX.axisX.motor.config.current_lim | 60 | 60 | [A] | ||
| odrvX.axisX.motor.config.current_lim_margin | 8 | 8 | [A] | ||
| odrvX.axisX.motor.config.torque_constant | 0.030629 | 0.030629 | [Nm/A] | ||
| odrvX.axisX.motor.config.motor_thermistor_current_limit | X | X | |||
| odrvX.axisX.motor.config.motor_thermistor_current_trip_level | X | X | |||
| odrvX.axisX.motor.config.inverter_temp_limit_lower | 100 | 100 | [°C] | ||
| odrvX.axisX.motor.config.inverter_temp_limit_upper | 120 | 120 | [°C] | ||
| odrvX.axisX.motor.config.requested_current_range | 60 | 60 | [A] | ||
| odrvX.axisX.motor.config.current_control_bandwidth | 1000 | 1000 | [Hz] | ||
| Encoder Configuration | |||||
| odrvX.axisX.encoder.config.mode | 0 | 0 | INCREMENTAL, HALL, SINCOS, SPI_ABS_CUI, SPI_ABS_AMS | ||
| odrvX.axisX.encoder.config.use_index | FALSE | FALSE | bool | ||
| odrvX.axisX.encoder.config.find_idx_on_lockin_only | FALSE | FALSE | bool | ||
| odrvX.axisX.encoder.config.abs_spi_cs_gpio_pin | 1 | 1 | Tx,Rx pin seting | ||
| odrvX.axisX.encoder.config.cpr | 8192 | 8192 | [cpr] | ||
| odrvX.axisX.encoder.config.offset | X | X | |||
| odrvX.axisX.encoder.config.offset_float | X | X | |||
| odrvX.axisX.encoder.config.bandwidth | 1000 | 1000 | [Hz] | ||
| odrvX.axisX.encoder.config.calib_range | 0.01999 | 0.01999 | [Count] | ||
| odrvX.axisX.encoder.config.calib_scan_distance | 50.2654 | 50.2654 | rps | ||
| odrvX.axisX.encoder.config.ignore_illegal_hall_state | FALSE | FALSE | bool | ||
| odrvX.axisX.encoder.config.zero_count_on_find_idx | X | X | |||
| odrvX.axisX.encoder.config.pre_calibrated | FALSE | FALSE | bool | ||
| odrvX.axisX.encoder.config.use_index | FALSE | FALSE | bool | ||
| odrvX.axisX.encoder.config.hall_polarity | 0 | 0 | seting pole | ||
| odrvX.axisX.encoder.config.hall_offset | X | X | |||
| Controller Configuration | |||||
| odrvX.axisX.controller.config.pos_gain | 20 | 20 | |||
| odrvX.axisX.controller.config.vel_gain | 1.2 | 0.8 | |||
| odrvX.axisX.controller.config.vel_integrator_gain | 5 | 5 | |||
| odrvX.axisX.controller.config.vel_limit | 2 | 2 | [Count/s] | ||
| odrvX.axisX.controller.config.vel_limit_tolerance | 1.2 | 1.2 | [%] | 1 = 100% | |
| odrvX.axisX.controller.config.vel_ramp_rate | 0.1 | 0.1 | [Count/s^2] | ||
| odrvX.axisX.controller.config.control_mode | 1 | 1 | POSITION_CONTROL, VELOCITY_CONTROL, TORQUE_CONTRO | ||
| odrvX.axisX.controller.config.input_mode | 1 | 1 | PASSTHROUGH, VEL_RAMP, POS_FILTER, TRAP_TRAJ | ||
| odrvX.axisX.controller.config.input_filter_bandwidth | 2 | 2 | [Hz] | ||
| odrvX.axisX.controller.config.inertia | 0 | 0 | |||
| odrvX.axisX.controller.config.trap_traj.config.vel_limit | X | X | |||
| odrvX.axisX.controller.config.trap_traj.config.accel_limit | X | X | |||
| odrvX.axisX.controller.config.trap_traj.config.decel_limit | X | X | |||
| odrvX.axisX.controller.config.trap_traj.config.A_per_css | X | X | |||
| Sensorless Configuration | |||||
| odrvX.axisX.sensorless_estimator.config.observer_gain | 1000 | 1000 | |||
| odrvX.axisX.sensorless_estimator.config.pll_bandwidth | 1000 | 1000 | |||
| odrvX.axisX.sensorless_estimator.config.pm_flux_linkage | 0.00158 | 0.00158 | |||
| Trapezoidal Trajectory Planner Parameters | |||||
| odrvX.axisX.trap_traj.config.vel_limit | 2 | 2 | [Count/s] | ||
| odrvX.axisX.trap_traj.config.accel_limit | 0.5 | 0.5 | [Count/s^2] | ||
| odrvX.axisX.trap_traj.config.decel_limit | 0.5 | 0.5 | [Count/s^2] | ||
| Endstop Configuration | |||||
| odrvX.axisX.min_endstop.config.gpio_num | 0 | 0 | Pin num | ||
| odrvX.axisX.min_endstop.config.enabled | FALSE | FALSE | bool | ||
| odrvX.axisX.min_endstop.config.offset | 0 | 0 | [Count] | ||
| odrvX.axisX.min_endstop.config.is_active_high | FALSE | FALSE | bool | ||
| odrvX.axisX.max_endstop.config.gpio_num | 0 | 0 | Pin num | ||
| odrvX.axisX.max_endstop.config.enabled | FALSE | FALSE | bool | ||
| Thermistor Configuration | |||||
| odrvX.axisX.motor.config.motor_thermistor | X | X | |||
| odrvX.axisX.motor.config.motor_thermistor_poly_coefficient_0 | X | X | |||
| odrvX.axisX.motor.config.motor_thermistor_poly_coefficient_1 | X | X | |||
| odrvX.axisX.motor.config.motor_thermistor_poly_coefficient_2 | X | X | |||
| odrvX.axisX.motor.config.motor_thermistor_poly_coefficient_3 | X | X | |||
| odrvX.axisX.motor.config.motor_thermistor_calib_temp | X | X |
