Agreed, I would love to help write a Windows program in C++ to interface with the ODrive through the serial commands, but without a stable connection, I don’t see the worth yet.
wayneStock
Agreed, I would love to help write a Windows program in C++ to interface with the ODrive through the serial commands, but without a stable connection, I don’t see the worth yet.
wayneStock
Hi,
here is the issue:
Here is the programm to simulate ASCII commands from Windows:
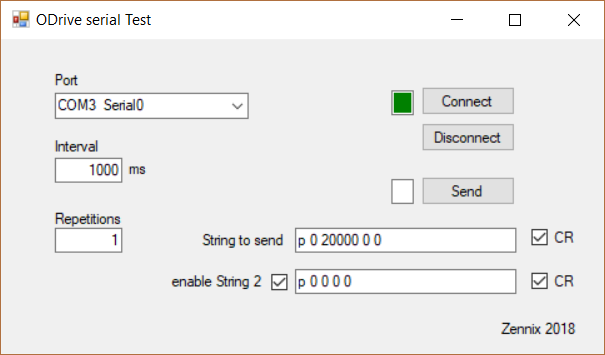
Testprogram: https://drive.google.com/open?id=1kKuIi_Zo5Npc25uD6jVV-5sX5PyVmX6X
greetings / Zennix
Hi cfisher, Zennix, Stijn , Barsk and wayneStock !
Thank you so much for your participation and understanding!
At the moment I am extremely confused and dont know what to do.
Imagine, that all our simulators would work good with the Odrive! - I think it would change the whole sim building scene! And lot of people would follow our work!!
I hope so much, that the ODrive developers can see this potential and will fix the problems soon !
kind regards
Peter
I fully agree Wickie, when odrive finally is easy to setup in simtools people will be using it a ton. They just need some good inspiration. Cant wait to see this take over the ever present sabertooth and dc motor solution!
In the meantime, I’m sure we could use an arduino to pass the serial to uart perhaps?
Hey Wickie,
Is it too much to ask for your CAD models? I would need to change a lot due to my county’s archaic measurement standards but it would be a great starting point. I completely understand if you don’t want to share them.
I’m searching for rotary shaft seals and I can’t seem to find reasonable ones rated for higher than 10 psi. What pressure rating did you go for?
Thanks,
Steve
Hi Boardy
I am still in the prototype phase of my project and some features are still under design. So its too soon to share some plans - sorry. But I can help you with answering some questions.
Regarding your question: I use a rotary shaft seal from a Ebay seller.
(Edit: or you can search for “BABSL NBR” )
The shaft seal is suitable for pressures up to 145 Psi. But we need much less.
Regards Wickie
Hi cfischer
I am not familiar with electronic interfaces, so I cant rate whether your proposal would work (“we could use an arduino to pass the serial to uart”). Are you experienced with these things and would you help us if Odrive will not be able to solve the USB communication problem?
Meanwhile I (maybe) found a backup solution for the Odrive in the Xsimulator-community.
Here is a link:
[FlyPT 6DOF](FlyPT 6DOF)
FlyPT uses Brushless Motors with internal hall sensors and a Arduino. The solution is not as elegant as the Odrive and also under development… but the motors would fit somehow in my actuators. We will see….
Regards Wickie
Bit late to the party, but I just wanted to chime in and say I like your linear actuator design. Thanks for taking the time to post detailed pictures.
Hi all!
After some days of confusion and frustration I calmed down a little and continued my project. Thats also because I made a small redesign around to motor area in order to be able to have have the possibility to use other motors that I might have to use for a relapse solution. That removes a little the fear from a complete failure. Now I could use motors up to 100mm length 
So I started to think about some noise improvements.
I tried to wrap my yoga mat around the actuator to see the impact in noise reduction . And because it is a verry heavy mat (thats important!) made from natural rubber (also important  ) , it seems to be perfect for damping noise. So I deceded to sew a jacket and ordered the same Joga mat in a prefered colour that fits in my living room
) , it seems to be perfect for damping noise. So I deceded to sew a jacket and ordered the same Joga mat in a prefered colour that fits in my living room  …only for a while
…only for a while  .
.
And what can I say - It was such a fun to sew the jacket together with my son, although we had no experience with sewing…
Although the actuator never was loud, now it purres like a cat  …and looks so cool with its new jacket.
…and looks so cool with its new jacket.
Here you can see the result and our short sound check with highspeed ( the loundspeaker of the TV was fairly low at this test!)
@Jake_Ketchum
nice to have you here at the party! You are allways wellcome!
kind regards
Wickie
Hi
Have you already been able to use FlyPT or do you still use SimTools?
If so, what are the commands you are sending with FlyPT, do they look like this:
[p 0 ]
Or like this:
p 0 <13>
Cheers
Carelsbergh Stijn
Hi Stijn
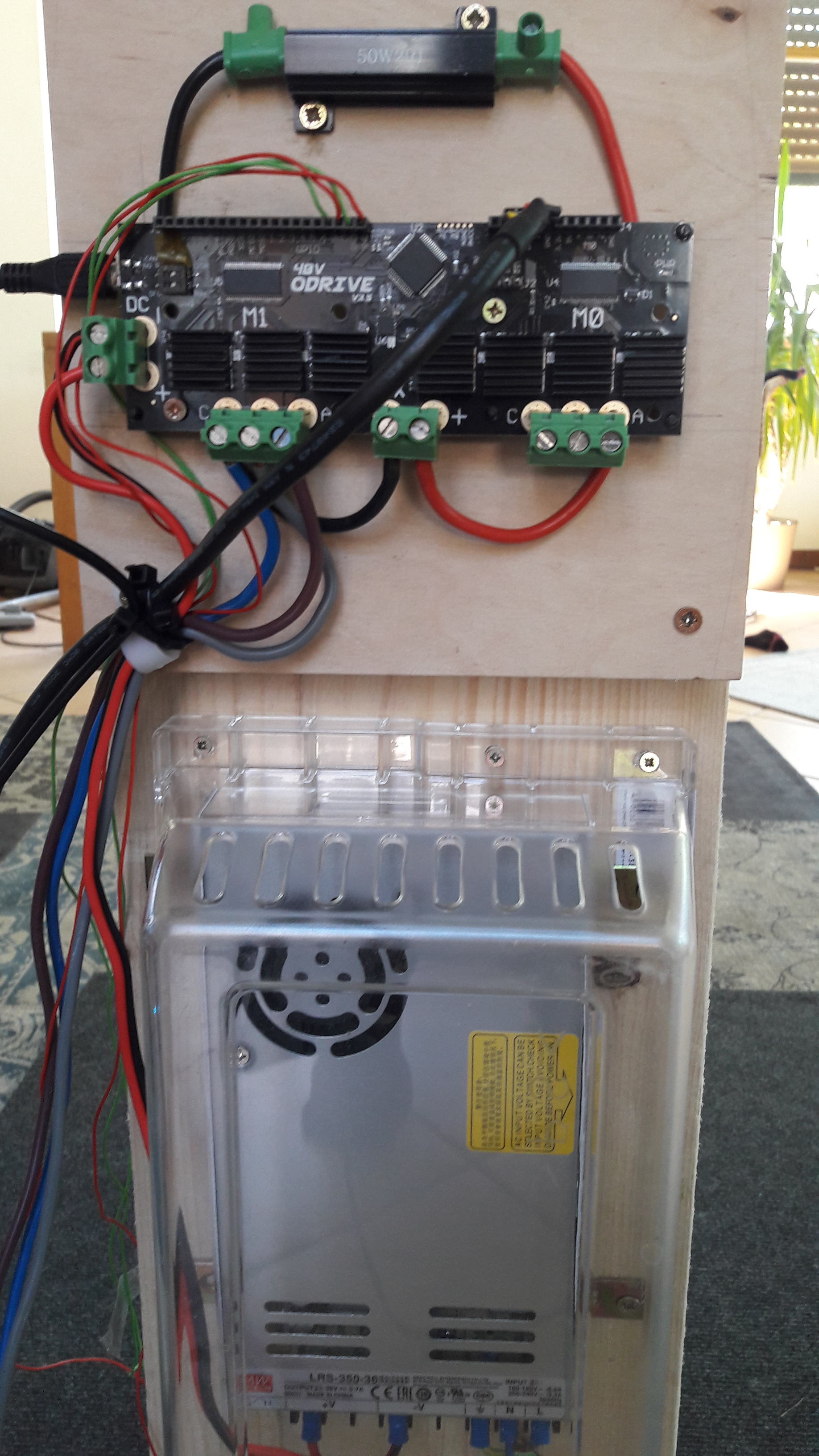
sorry, I still “work” with Simtools. As I wrote some posts bevore, my work with Odrive is a little on hold and I concentrate more on optimizing the mechanical design. After this I will continue with some measurements about the power consumption. Today I ordered a 36V, 350W power supply from Meanwell for first Tests with my actuator.
I hope so much, that you can manage to solve the problems you still have. I follow all your comments, but cant really help - sorry!
Good luck!!!
kind regards
Wickie
Hi all,
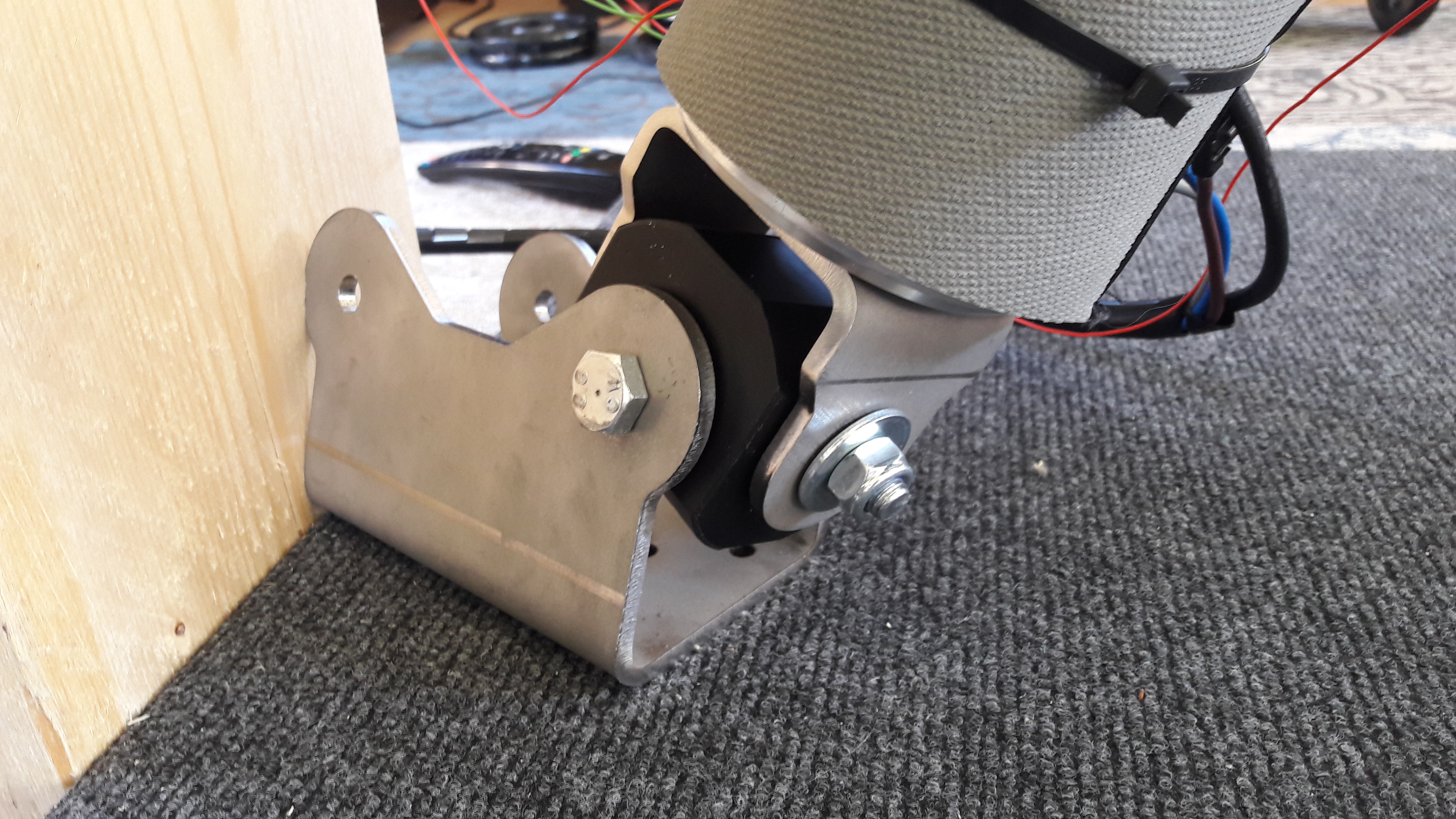
the last two weeks have been very productive with help of my son. I got the lasercut- and bent parts for the universal joints. They look really great and are very precise. So I could finish two komplete joints and add them to my actuator prototype.
The joints are extreme robust and dont have any recognizable backlash.
So for the low material cost of aproximately 25,- each , the design of the jonts could be a also a great solution for other DIY sim builders.
Yesterday I build up a simple test stand. It ist made from cheap wood and although its creaking like a old castle door it works good.
Finally I put the new 36V, 350W power source from meanwell to the system.
To simulate the load of the platform and driver I put aprox 30 kg weight onto the build.
What we have seen at the first runs was mindblowing  !!! :
!!! :
It seems that the actuator has an easy game with all the weight put on it! – And after aprox 15 minutes testing, the motor and the power source remained cold !!!
Because all test were done without the internal air spring and the tests went good, maybe the airspring seem not really be necessary for the 6DOF simulator. I will do more tests and see…
The next steps will be again to optimise the actuator design taking into account all what I have learned so far.
What still need to be solved is the motor calibration sequence that needs to be done without or only with little load. My tests showed me, that with a load of aprox 10 kg it still works, but with 15 kg it fails.
Maybe a short spring or a rubber damper in the lower internal endstop can help…
kind regards
Wickie7
Hi
You are back on track, well done, I’ve also posted an update on my racesimulator, take a look
What is your speed limit set on?
Keep up the good work!
Cheers
Hi Wickie,
nice to see your progress.
Greetings / Zennix
Hi Wickie, what a great job you are doing! I hope one day real soon (cruise ships are holding me back) Then I will follow your lead 
Regards Jerry.
Hello.
I did not find positioning procedure.
Are you going to implement exact 3d positioning?
For Steward’s platform (hexapod) there is some math to resolve tajectory.
If you write something about it that I’ve missed, please point me, I’d love to read it.
Regards and good luck
Hi Bart,
currrently I only intend to make positioning with help of the SimTools simulator Software and a plugin from
FlyPt:
https://www.xsimulator.net/communit…hexapod-interface-for-linear-actuators.12859/
But with help of an apropriate Software you would also be able to make exact positionings.
I hope I understood your question correct.
regards
Wickie
Hi
Good luck, believe me, when you have done this once, you never want to do it again  .
.
Cheers
Is there a link to your wonderful spreadsheet? I just uploaded Wetmelon’s firmware with endstops… is there a guide or a list of commands to using that repository?
Thanks!