Thank you for the offer, I don’t have the order number as this task was passed down to me. Some other competent engineer was supposed to attend this task, but I wanted to give it a shot myself.
Learning is great!
I can also look up the order from an email, address, etc – my email is solomon.greenberg@odriverobotics.com, if you want to send anything there.
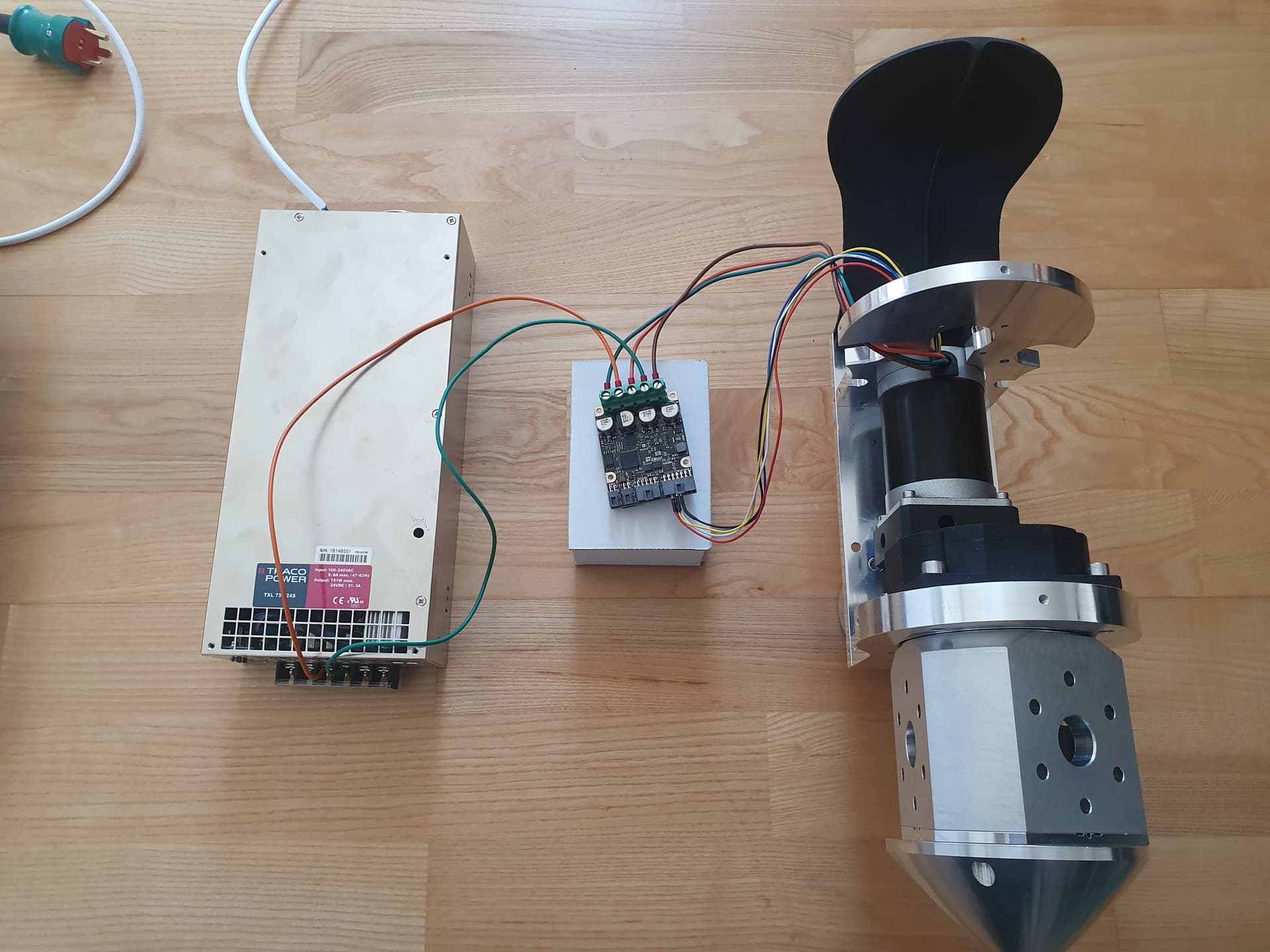
No I do not use an USB isolator as that was not part of the controller purchase.
I’d strongly recommend grabbing one – they’re recommended/required for when both USB and DC power are connected simultaneously, to prevent possible damage caused by inadvertent ground loops.
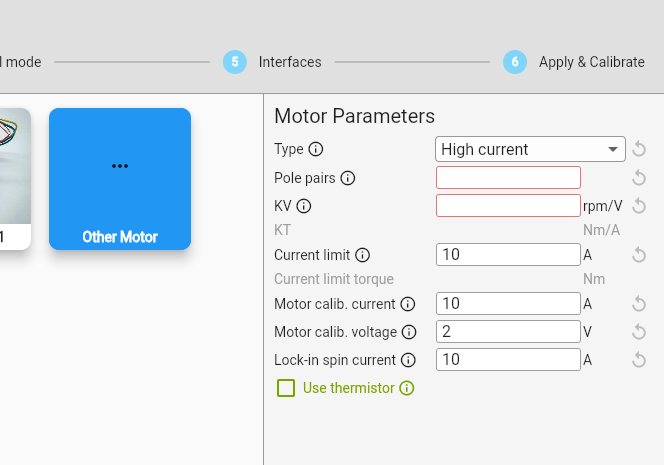
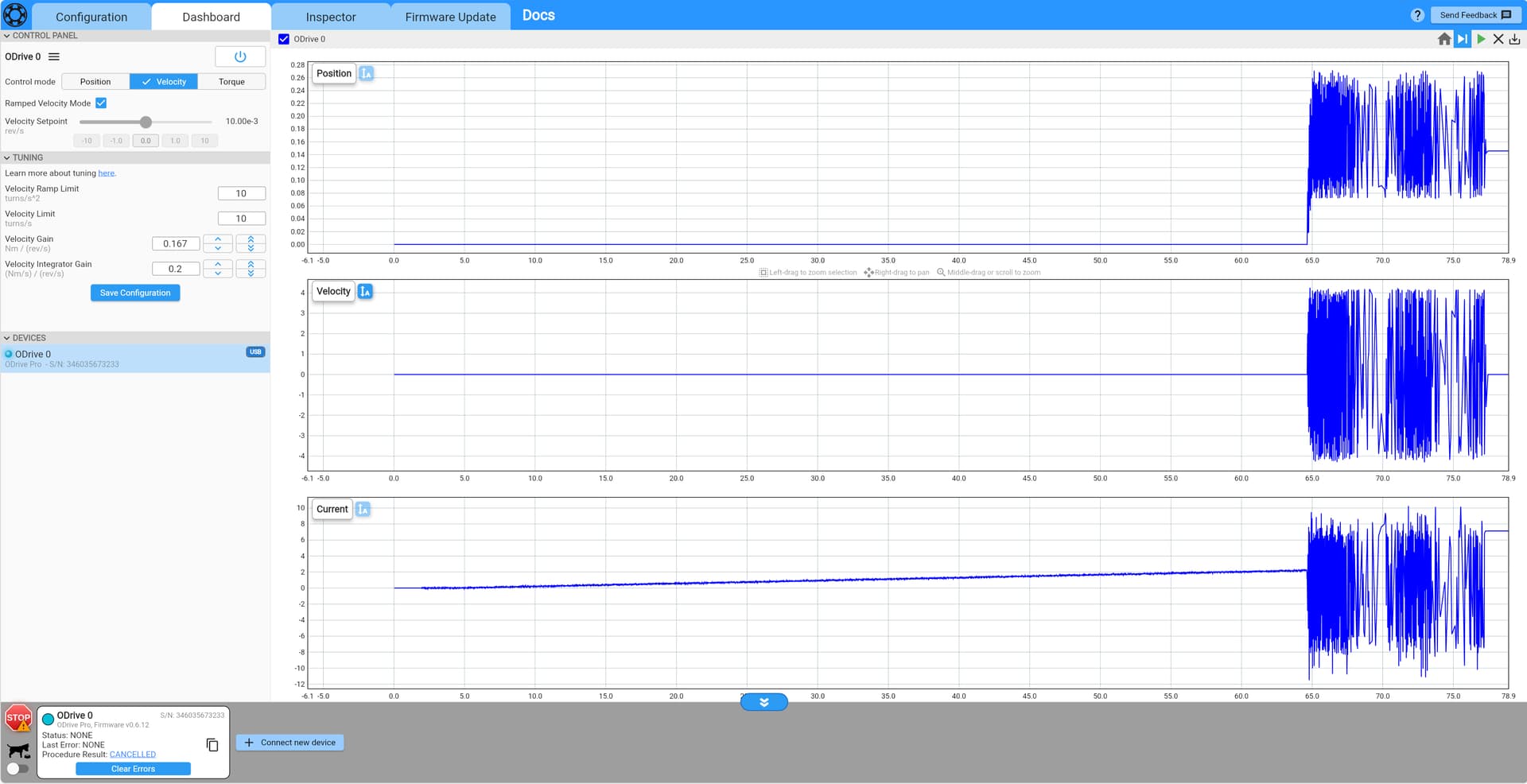
Good news, between changing the pole pairs to 4, and disconnecting the motor I got it spinning after the calibration. However the motion is incredibly janky, even at 0.01 velocity setpoint (see image):
Great to hear it’s working! I definitely have some ideas for how to improve this.
At a baseline, I’d start with integrator gain at zero, and velocity gain at some much smaller number (maybe 0.01). Step velocity setpoints up to 10, and back to zero, each time increasing the velocity gain until you get vibration like you have there. At that point, set the velocity gain in half. Then, do the same thing with the integrator gain, keeping the velocity gain you just found.
I’ve exported the odrive_config, but it is 354 lines and the website does not allow .json upload.
Hmm, that json file will be very useful for diagnostics. Could you upload it somewhere else (e.g. pastebin, google drive) and link, or just email it to me?