Setting:
Ubuntu: 20.04
Python: 3.10.0
Firmware: 0.5.1
OdriveBoard: v3.6
Motor: A2212/13T
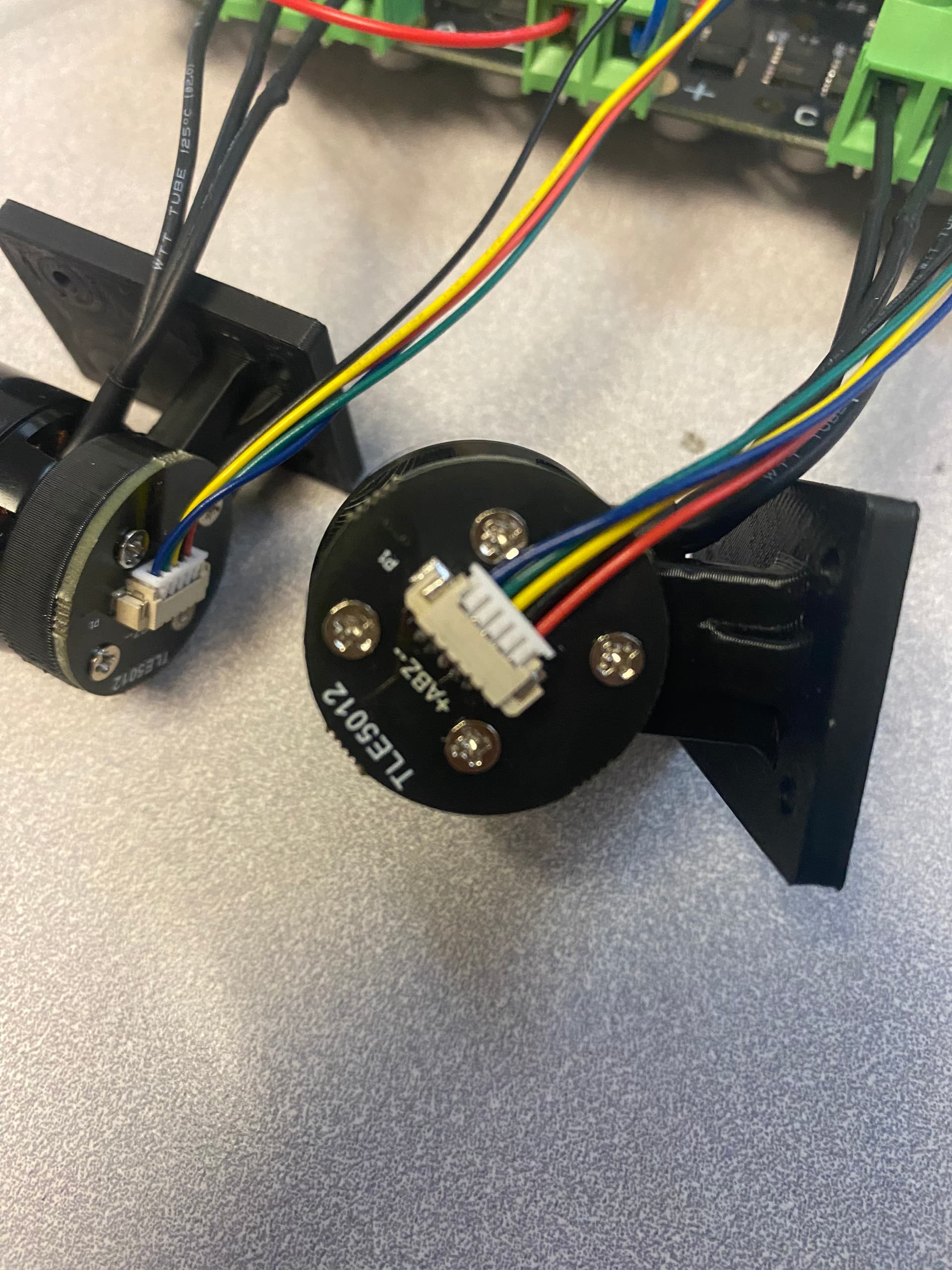
Encoder: 1000KV
Problem:
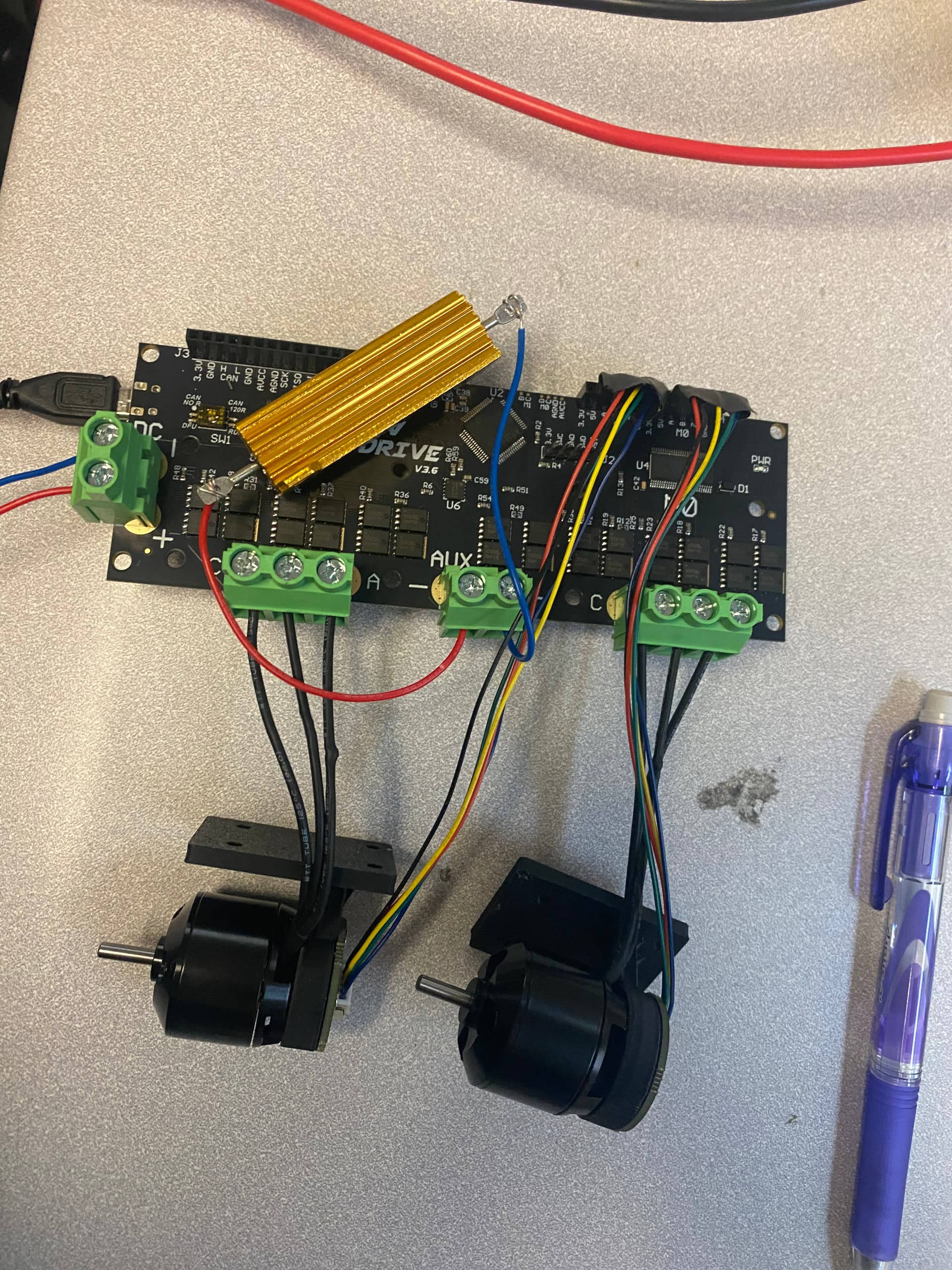
I’m trying to control 2 motors with v3.6 board, and with the following setting, the first motor worked:
odrv0.config.brake_resistance = 2.0
odrv0.config.dc_bus_undervoltage_trip_level = 8.0
odrv0.config.dc_bus_overvoltage_trip_level = 56.0
odrv0.config.dc_max_positive_current = 20.0
odrv0.config.dc_max_negative_current = -3.0
odrv0.config.max_regen_current = 0
odrv0.save_configuration()
odrv0.axis0.motor.config.pole_pairs = 7
odrv0.axis0.motor.config.calibration_current = 5
odrv0.axis0.motor.config.resistance_calib_max_voltage = 2
odrv0.axis0.motor.config.motor_type = MOTOR_TYPE_HIGH_CURRENT
odrv0.axis0.motor.config.current_lim = 15
odrv0.axis0.motor.config.requested_current_range = 20
odrv0.save_configuration()
odrv0.axis0.encoder.config.mode = ENCODER_MODE_INCREMENTAL
odrv0.axis0.encoder.config.cpr = 16384
odrv0.axis0.encoder.config.bandwidth = 3000
odrv0.axis0.config.calibration_lockin.current = 5
odrv0.axis0.config.calibration_lockin.ramp_time = 0.4
odrv0.axis0.config.calibration_lockin.ramp_distance = 3.1415927410125732
odrv0.axis0.config.calibration_lockin.accel = 20
odrv0.axis0.config.calibration_lockin.vel = 40
odrv0.save_configuration()
odrv0.axis0.controller.config.control_mode = CONTROL_MODE_TORQUE_CONTROL
odrv0.axis0.controller.config.vel_limit = 50
odrv0.axis0.controller.config.pos_gain = 30
odrv0.axis0.controller.config.vel_gain = 0.02
odrv0.axis0.controller.config.vel_integrator_gain = 0.2
odrv0.axis0.controller.config.input_mode = INPUT_MODE_PASSTHROUGH
odrv0.save_configuration()
odrv0.reboot()
odrv0.axis0.requested_state = AXIS_STATE_MOTOR_CALIBRATION
odrv0.axis0.motor.config.pre_calibrated = True
odrv0.axis0.requested_state = AXIS_STATE_ENCODER_OFFSET_CALIBRATION
odrv0.axis0.config.startup_encoder_offset_calibration = True
odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
odrv0.axis0.config.startup_closed_loop_control = True
odrv0.save_configuration()
odrv0.reboot()
And then I tried the same configuration for the second motor but replace the axis0 to axis1:
odrv0.axis1.motor.config.pole_pairs = 7
odrv0.axis1.motor.config.calibration_current = 5
odrv0.axis1.motor.config.resistance_calib_max_voltage = 2
odrv0.axis1.motor.config.motor_type = MOTOR_TYPE_HIGH_CURRENT
odrv0.axis1.motor.config.current_lim = 15
odrv0.axis1.motor.config.requested_current_range = 20
odrv0.save_configuration()
odrv0.axis1.encoder.config.mode = ENCODER_MODE_INCREMENTAL
odrv0.axis1.encoder.config.cpr = 16384
odrv0.axis1.encoder.config.bandwidth = 3000
odrv0.axis1.config.calibration_lockin.current = 5
odrv0.axis1.config.calibration_lockin.ramp_time = 0.4
odrv0.axis1.config.calibration_lockin.ramp_distance = 3.1415927410125732
odrv0.axis1.config.calibration_lockin.accel = 20
odrv0.axis1.config.calibration_lockin.vel = 40
odrv0.save_configuration()
odrv0.axis1.controller.config.control_mode = CONTROL_MODE_TORQUE_CONTROL
odrv0.axis1.controller.config.vel_limit = 50
odrv0.axis1.controller.config.pos_gain = 30
odrv0.axis1.controller.config.vel_gain = 0.02
odrv0.axis1.controller.config.vel_integrator_gain = 0.2
odrv0.axis1.controller.config.input_mode = INPUT_MODE_PASSTHROUGH
odrv0.save_configuration()
odrv0.reboot()
odrv0.axis1.requested_state = AXIS_STATE_MOTOR_CALIBRATION
odrv0.axis1.motor.config.pre_calibrated = True
odrv0.axis1.requested_state = AXIS_STATE_ENCODER_OFFSET_CALIBRATION
odrv0.axis1.config.startup_encoder_offset_calibration = True
odrv0.axis1.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
odrv0.axis1.config.startup_closed_loop_control = True
odrv0.save_configuration()
odrv0.reboot()
dump_errors(odrv0)
But this gives me an axis1 error:
system: not found
axis0
axis: no error
motor: no error
DRV fault: not found
sensorless_estimator: no error
encoder: no error
controller: no error
axis1
axis: Error(s):
AxisError.MOTOR_FAILED
motor: Error(s):
MotorError.MODULATION_MAGNITUDE
DRV fault: not found
sensorless_estimator: no error
encoder: no error
controller: no error
I wonder whether I’m controlling it the right way, and how to resolve this problem.